










仿人搏击机器人的仿生控制系统设计
摘要
随着科技的不断进步,各种类型的机器人相继的研发成功,其中仿人型机器人是机器人领域中最高研究成果。以往仅处于实验室中,如今逐渐进入大众生活当中。相对于其他机器人,仿人机器人具有人的外形,并具备良好的人机交互能力。因此,在服务、娱乐等直接接触人类的领域,仿人机器人具有更明显的优势。不仅如此,从技术发展的角度考虑,仿人机器人的研究将会对传统的机械结构、控制方式产生深远影响,并将极大地促进仿生学的研究和应用,使人类更好地破解生命的奥秘。本文主要基于国内外仿人机器人发展技术水平, 探讨一种可以实现互动娱乐、人为可控的仿人机器人。
关键词:仿人机器人;可控制;搏击运动;
Abstract
With the continuous progress of science and technology, various types of robots have been developed successfully, among which humanoid robots are the highest research results in the field of robotics. In the past, it was only in the laboratory, and now it is gradually entering the public life. Compared with other robots, humanoid robots have human form and good human-computer interaction ability. Therefore, humanoid robots have a more obvious advantage in areas of direct contact with humans, such as services and entertainment. Not only that, from the point of view of technological development, the research of humanoid robot will have a profound impact on the traditional mechanical structure and control mode, and will greatly promote the research and application of bionics, so that human beings can better solve the mysteries of life.
Based on the development technology level of humanoid robot at home and abroad, this paper discusses a kind of humanoid robot which can realize interactive entertainment and man-controlled human being.
Keywords: humanoid robot; controllable; fight movement;
目录
1 绪论 1
1.1 引言 1
1.2 机器人的发展及技术 1
1.2.1 机器人的发展 1
1.2.2 机器人技术 2
1.3 仿人搏击机器人的优点及国内外研究概况 3
1.3.1 仿人机器人的优点 3
1.3.2 仿人机器人的步态特点及研究意义 3
1.3.3 国外研究概况 3
1.3.4 国内研究概况 8
1.4 本课题的主要工作 9
2 仿人机器人本体结构设计分析 10
2.1 引言 10
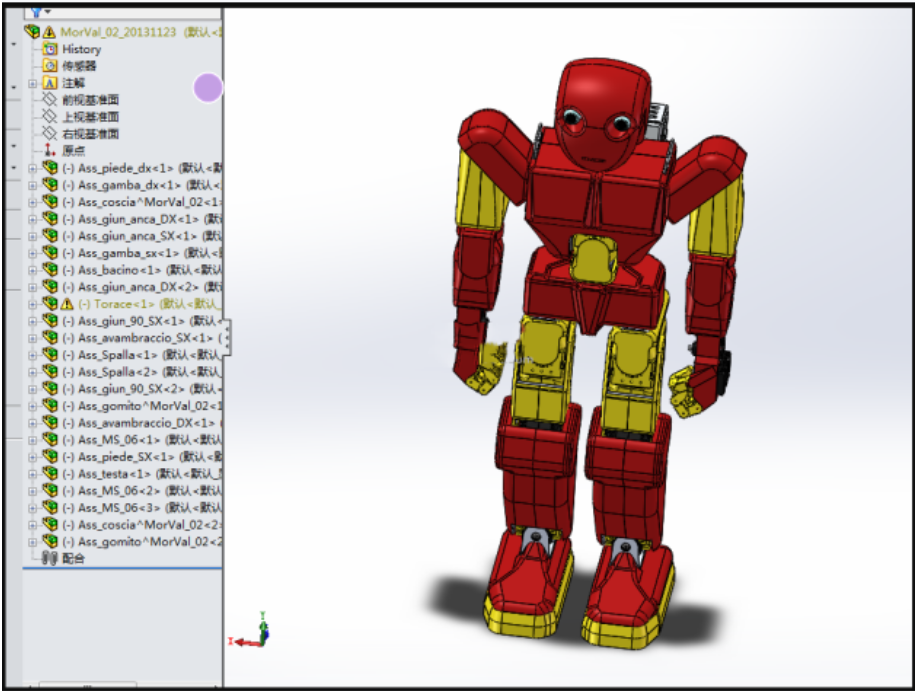
2.2 仿人搏击机器人的结构分析 10
2.3 机器人设计思路 11
2.4 机器人设计方案 12
2.5 驱动方式的选择 14
3 仿人机器人的具体制作 15
3.1 仿人机器人的材料选择 15
3.2 仿人机器人的零件加工 16
3.2.1 加工机器的选择 16
3.2.2 线切割的相关介绍 16
3.2.3 折弯机的相关简单介绍 18
3.3 仿人搏击机器人的组装 18
3.3.1 舵机和部分配件的组装 18
3.3.2 两足步行机器人的两个上肢的组装 19
3.3.3 仿人搏击机器人躯干的组装 19
3.3.4 仿人搏击机器人腿部的组装 20
3.3.5 仿人搏击机器人头部的安装 20
3.4 仿人搏击机器人相关数据 21
3.5仿人搏击机器人总体尺寸 22
3.6舵机具体参数 22
4. 仿人搏击机器人的硬件设计 22
4.1 仿人搏击机器人的硬件设计思路 22
4.2 仿人搏击机器人的单片机选择方案 22
3.3 仿人搏击机器人的无线遥控传感技术选择方案 25
5. 仿人搏击机器人的电路设计 26
5.1 仿人搏击机器人的电路设计思路 26
5.2 仿人搏击机器人的主控制系统电路模块设计 27
5.3 仿人搏击机器人的无线遥控传感系统电路模块设计 28
5.4 仿人搏击机器人的稳压电源系统电路模块设计 28
5.5 仿人搏击机器人的关节运动系统电路模块设计 29
5.6 仿人搏击机器人的总电路原理图设计 30
6. 仿人搏击机器人的程序控制设计 30
6.1 仿人搏击机器人的程序控制设计思路 30
6.2 仿人搏击机器人的头文件函数程序设计 30
6.3 仿人搏击机器人的程序函数定义设计 30
6.4 仿人搏击机器人的关节运动控制部分的程序设计 31
6.5仿人搏击机器人的主控制系统部分的程序设计 31
6.6 仿人搏击机器人的总程序设计 31
课题总结 32
结束语 33
参 考 文 献 34
1 绪论
1.1 引言
目前,机器人已形成一个不同技术层次、应用于多种环境的“庞大”家族,从天上到地下,从陆地到海洋到处都可以看到机器人的身影。世界著名机器人专家,日本早稻田大学的加藤一郎教授曾经指出“机器人应当具有的最大的特征之一是步行功能”。步行机器人的研究涉及到多门学科的交叉融合,如仿生学、机构学、控制理论与工程学、电子工程学、计算机科学及传感器信息融合等。仿人形机器人正成为机器人研究中的一个热点,其研究水平,在一定程度上代表了一个国家的高科技发展水平和综合实力。研究仿人形仿人步行机器人,除了具有重要的学术意义,还有现实的应用价值。机器人技术与系统作为20世纪人类最伟大的发明之一,自60年代初问世以来, 历经近半个世纪的发展,已经取得了丰硕的成果和长足的进步[1]。在各式各样的机器人当中,仿人型机器人是与人类相似度最高,控制系统结构最复杂、集成度最高的一类机器人。仿人型机器人是从机器人的形态和功能的角度来进行定义的,这是为了区别于工业等类型机器人。而搏击机器人是在仿人型机器人应用角度定义上区分的,不同于其他娱乐、服务型机器人应用在酒店,银行、等场所,搏击机器人主要应用在竞赛方面。
搏击机器人具有最大的类人特征之一就是实现四肢协调运动,实现人类较复杂的肢体动作。由于其类人的外形和功能,使得其适合在人类的日常生活和工作中与人类协同工作,而且不需要专门为其工作而进行环境的大规模改造[2]。仿人型机器人还可以在危险环境中代替人类进行工作,大大拓宽人类的活动空间。本课题旨在研究仿人搏击机器人实现搏击动作的同时,从而拓展出可以运用在救援、消防、勘察等具有相对危险性的工作领域的仿人机器人,代替人去工作,保障人民群众生命安全,促进社会发展。这也是本课题研究意义所在。
1.2 机器人的发展及技术
1.2.1 机器人的发展
20世纪40年代,伴随着遥控操纵器和数控制造技术的出现,关于机器人技术的研究开始出现。60年代美国的Consolidated Control公司研制出第一台机器人样机,并成立了Unimation公司,定型生产了Unimate机器人。20世纪70年代以来,工业机器人产业蓬勃兴起,机器人技术逐渐发展为专门学科。1970年,第一次国际机器人会议在美国举行。经过几十年的发展,数百种不同结构、不同控制系统、不同用途的机器人已进入了实用化阶段。
目前,尽管关于机器人的定义还未统一,但一般认为机器人的发展按照从低级到高级经历了三代。第一代机器人,主要指只能以“示教-再现”方式工作的机器人,其只能依靠人们给定的程序,重复进行各种操作。目前的各类工业机器人大都属于第一代机器人。第二代机器人是具有一定传感器反馈功能的机器人,其能获取作业环境、操作对象的简单信息,通过计算机处理、分析,机器人按照己编好的程序做出一定推理,对动作进行反馈控制,表现出低级的智能。当前,对第二代机器人的研究着重于实际应用与普及推广上。第三代机器人是指具有环境感知能力,并能做出自主决策的自治机器人。它具有多种感知功能,可进行复杂的逻辑思维,判断决策,在作业环境中可独立行动。第三代机器人又称为智能机器人,并己成为机器人学科的研究重点,但目前还处于实验室探索阶段[1]。
机器人技术己成为当前科技研究和应用的焦点与重心,并逐渐在工农业生产和国防建设等方面发挥巨大作用。可以预见到,机器人将在21世纪人类社会生产和生活中扮演更加重要的角色。
1.2.2 机器人技术
机器人学是一门发展迅速的且具有高度综合性的前沿学科,该学科涉及领域广泛,集中了机械工程、电气与电子工程、计算机工程、自动控制工程、生物科学以及人工智能等多种学科的最新科研成果,代表了机电一体化的最新成就[2]。机器人充分体现了人和机器的各自特长,它比传统机器具有更大的灵活性和更广泛的应用范围。机器人的出现和应用是人类生产和社会进步的需要,是科学技术发展和生产工具进化的必然。目前,机器人及其自动化成套装备己成为国内外备受重视的高新技术应用领域,与此同时它正以惊人的速度向海洋、航空、航天、军事、农业、服务、娱乐等各个领域渗透。
目前,虽然机器人的能力还是非常有限的,但是它正在迅速发展。随着各学科的发展和社会需要的发展,机器人技术出现了许多新的发展方向和趋势,如网络机器人技术、虚拟机器人技术、协作机器人技术、微型机器人技术和仿人步行机器人技术等。人们普遍认为,机器人技术将成为紧随计算机技术及网络技术之后的又一次重大的技术革命,它很可能将世界推向科学技术的新时代[3]。机器人技术是近年来高新技术发展的一个重要领域和研究热点。随着机器人技术的发展,机器人的应用领域的不断扩大,机器人技术应用的领域正从过去的以工业应用为主逐步向大众生活转变,同时对机器人的性能提出了更高的要求[3]。并随着智能技术突飞猛进的发展、教育理念的不断更新,作为综合了人工智能、计算机、自动控制、图像处理、传感器及信息融合、精密机构、无线通讯、机械电子学和新材料等前沿科技的机器人技术也在为教育改革贡献自己的力量[4]。为了推动机器人技术的发展,培养学生创新能力,在全世界范围内相继出现了一系列的机器人竞赛,如RoboCup、Fira、ABU-RoboCon、CCTV-ROBOCON、国际机器人奥林匹克竞赛、FLL机器人世界锦标赛、中国青少年机器人竞赛等。更多小型的机器人赛事更是数不胜数。[5]
机器人竞赛实际上是高技术的对抗赛,从一个侧面反映了一个国家信息与自动化领域基础研究和高技术发展的水平。机器人竞赛使研究人员能够利用各种技术,获得更好的解决方案,从而又反过来促进各个领域的发展,这也正是开展机器人竞赛的深远意义,同时也是机器人竞赛的魅力所在[6]。
机器人竞赛融趣味性、观赏性、科普性为一体,给青年提供了能够充分展示聪明才智的舞台,也为青年提供了一个充分表现科技思想和行动的舞台,培养了他们实际动手能力,团队协作能力,提高了创新能力,充分贯彻了中央“科教兴国”战略方针,是“科教兴国”战略方针的具体体现和创新举措。机器人竞赛已经成一个能激发学生们的学习兴趣、引导他们积极探索未知领域、参与国际性科技活动的良好的平台[7]。
1.3 仿人搏击机器人的优点及国内外研究概况
1.3.1 仿人机器人的优点
首先,仿人步行的移动方式在地面不平整或其它恶劣条件下(如充满障碍物)比其他方式要灵活得多,具有更好的机动性。研究仿人形仿人步行机器人,以代替人类在核电站、太空、海底及其它危害人类身心健康的复杂极端环境中工作,将大大拓展人类的活动空间。
其次,仿人步行机器人的步行系统是一个内在的不稳定系统,其动力学特性非常复杂,具有多变量、强耦合、非线性和变结构的特点。因此,它是控制理论和控制工程领域的一个极好的研究对象,开展仿人步行技术的研究,必然推动控制理论的发展和控制技术的进步。
再次,步行是人类的一种基本活动能力,但有相当数量的人因为疾病或意外事故失去了这种能力,仿人步行技术的发展会促进动力型假肢的研制,将有可能解决截瘫病人和小儿麻痹症患者的行走问题,为康复医学做出贡献。对机器人仿人动态行走机理的深入研究也使我们更深刻地理解人类活动的内在本质,有助于生物医学工程和体育运动科学的发展。
1.3.2 仿人机器人的步态特点及研究意义
步态规划是仿人机器人失衡检测与控制的基础及预备性工作,也是仿人步行机器人的一项重要内容。所谓的步态,是指在步行过程中,步行本体的身体各部位在时序和空间上的一种协调关系;步态规划就是给出机器人各关节位置与时间的关系,是仿人步行机器人研制中的一项关键技术,也是难点之一。步态规划的好坏将直接影响到仿人步行机器人的行走稳定性、美观性以及各关节所需驱动力矩的大小等多个方面,已经成为仿人步行机器人领域的研究热点。基于上述原因,本课题拟进行仿人机器人步行稳定性研究,研制具有高度稳定性的仿人步行机器人平台,为进一步的行走机器人失衡检测及控制技术研制奠定基础。
1.3.3 国外研究概况
研制与人类外观特征类似,具有人类智能,灵活性,并能够与人交流,不断适应环境的仿人机器人一直是人类的梦想之一。世界上最早的仿人机器人研究组织诞生于日本,1973年,以早稻田大学加藤一郎教授为首,组成了大学和企业之间的联合研究组织,其目的就是研究仿人机器人。加藤一郎教授突破了仿人机器人研究中最关键的一步—两足步行。1996年11月,本田公司研制出了自己的第一台仿人步行机器人样机P2,2000年11月,又推出了最新一代的仿人机器人ASIMO。随后本田工程师对仿人机器人ASIMO不断地进行完善。目前已知本田公司最新款机器人ASIMO是2011年11月推出版本[8]。
参 考 文 献
[1] 周远清,张再兴等编著. 智能机器人系统[M]. 北京: 清华大学出版社,1989.
[2] 蒋新松主编. 机器人学导论[M]. 沈阳: 辽宁科学技术出版社,1994.
[3] 方建军,何广平. 智能机器人[M]. 北京:化学工业出版社,2004.
[4] 张永学. 仿人机器人步态规划及步行控制研究[D]. 哈尔滨工业大学博士学位论文. 2001.
[5] 刘志远. 仿人搏击机器人动态行走研究[D]. 哈尔滨工业大学博士论文. 1991.
[6] 刘志远,戴绍安,裴润,张栓,傅佩深. 零力矩点与仿人搏击机器人动态行走稳定性的关系[N]. 哈尔滨工业大学学报. 1994.
[7] 纪军红. HIT-Ⅱ仿人步行机器人步态规划研究[D]. 哈尔滨工业大学博士论文,2000.
[8] 麻亮,纪军红,强文义,傅佩深. 基于力矩传感器的仿人机器人在线模糊步态调整器设计[R]. 2000.
[9] 竺长安. 两足步行机器人系统分析、设计及运动控制[D]. 国防科技大学博士论文. 1992.
[10] 马宏绪. 两足步行机器人动态步行研究[D]. 国防科技大学博士论文. 1995.
[11] 包志军. 仿人型机器人运动特性研究[D]. 上海交通大学博士论文. 2000.
[12] 孙富春,朱纪洪,刘国栋等. 机器人学导论-分析、系统及应用[M]. 北京:电子工业出版社,2004.
[13] 柳洪义,宋伟刚. 机器人技术基础[M]. 北京:冶金工业出版社,2002
[14] 刘晋春,白基成,郭永丰. 特种加工[M]. 北京:机械工业出版社,2008.3.
[15] 解仑,王志良,李华俊.仿人步行机器人制作技术[M]. 北京:机械工业出版社,2008.4.



