





















汽车轮胎安装工具设计
摘要: 我国目前已经是汽车发展大国,二十一世纪初中国就开始制造发展汽车行业,持续发展到现在中国已经是最
大的全球汽车生产和销售国之一,政府出台了很多政策来促使汽车行业大规模生产制造,现如今汽车行业发展迅速,
但随时而来的问题就是如何经济化,效率化,精度化,人力资源能保证经济化可靠但是效率低,现在人工智能已大
规模投入到生产制造业而对于汽车轮胎的安装人力已经滞停,AI智能机械爪已经代替人力进行可靠有效的机械发展,
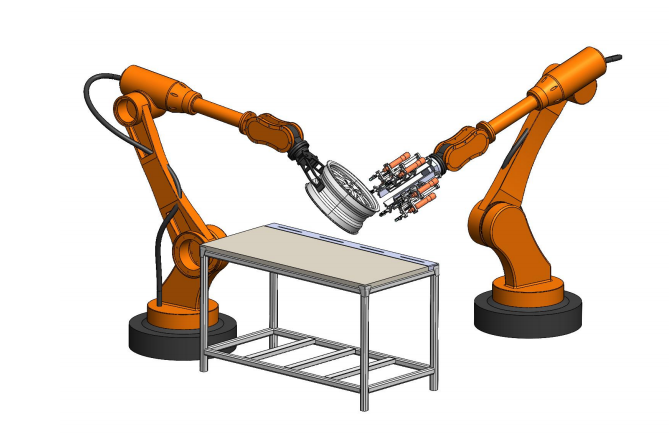
所以我研究的问题就是如何使用机械爪和自动进给螺丝来进行汽车轮胎安装。
关键词:汽车轮胎 三轴机械爪和自动进给螺丝机设计
第一章 绪论
1.1 选题背景及机械臂发展趋势
如今我国汽车行业发展速度迅速,已经成为了全球性汽车发展大国,而汽车轮胎的
安装已经是一组程序,而不是人工自由组装轮胎,机械臂的问世已经大大的提高了汽车
行业的发展,比如机械臂焊接车身,机械臂自由组装车门和车尾箱,而今天我们要讨论
的问题是如何高效率的安装汽车轮胎,如何摆脱人工拧紧不当和效率低的问题,假如制
造出一款自动装夹轮胎的机械臂可以比人工安装高上数十倍的效率,在一些一线城市已
经大量投入时间金钱去研究和制造机械臂来代替人工,所以此次研究的目标就是使用机
械臂和螺丝机来安装轮胎。
随着科技的快速发展和不断进步,机械臂作为现代工业生产中的核心设备,正在经
历一系列创新与变革。以下是机械臂的八大发展趋势:
1. 高精度与高效率:随着精密制造和高效生产的需求增长,机械臂的精度和效率
成为了关键指标。通过先进的控制系统、高精度传感器和优化的机械结构设计,未来的
机械臂将能够实现更细微、更精确的操作,并在更短的时间内完成更多任务。
2. 智能化与自主化:随着人工智能和机器学习技术的应用,机械臂正逐渐具备更
高的智能化和自主化能力。它们可以自主学习、自我优化,甚至根据环境变化自主做出
决策。这将极大地提高机械臂的适应性和灵活性。
3. 人机协同作业:未来的机械臂将更加注重与人类的协作。它们将被设计成更加
安全、易操作,并能够与人类在同一空间内协同工作。这种协作模式将极大地提高生产
效率,同时降低人力成本。
4. 模块化与轻量化:模块化设计使得机械臂更加易于维护和升级,同时降低了制
造成本。而轻量化则有助于提高机械臂的移动速度和灵活性,减少能源消耗。
5. 柔顺性与安全性:新一代机械臂将更加注重柔顺性和安全性。它们将被设计成
更加柔软、灵活,能够适应各种复杂环境和任务需求。同时,通过先进的安全保护措施,
确保机械臂在与人类或其他设备交互时的安全性。
综上所述,未来的机械臂将朝着高精度与高效率、智能化与自主化、人机协同作业、
模块化与轻量化、柔顺性与安全性、多功能集成化、应用领域扩展以及绿色环保与可持
续等方向发展。这些趋势将共同推动机械臂技术的不断创新和进步,为人类的生产和生
活带来更多便利和价值。
目 录
第一章 绪论..........................................................................................................1
1.1 选题背景及机械臂发展趋势 ................................................................................. 1
1.2 机械臂和螺丝机的应用背景 .....................................................................................2
1.3 机械臂设计的意义和目的 ........................................................................................ 3
第二章 机械臂和自动螺丝进给机的建立..........................................................4
2.1 机械臂的确定 ........................................................................................................... 4
2.2 自动螺丝进给机的确定 ............................................................................................ 5
2.3 选取装夹轮胎方案三维模型..................................................................................... 6
第三章 机械臂和自动螺丝进给机建模............................................................. 7
3.1 机械臂的建模 ............................................................................................................ 7
3.2 自动螺丝进给机的建模............................................................................................10
3.3 轮胎轮毂的建模........................................................................................................19
3.4 工作台的建模............................................................................................................20
3.5 整体呈现建模 ...........................................................................................................21
第四章 电气设计与PLC编程...............................................................................22
4.1电气设计的基本概念...................................................................................................22
4.2 电气设计的主要内容 ............................................................................................... 22
4.3 PLC梯形图 .................................................................................................................24
4.4 PLC博图仿真..............................................................................................................28
第五章 总结........................................................................................................29
致 谢..................................................................................................................30
参考文献..............................................................................................................31
参考文献
[1] DB 32/T 4018-2021 可移动式机械臂通用技术【D】.常州机电职业技术学院.2021. [2] 金旭星.汽车机械基础【M】.北京:人民邮电出版社,2016. [3] 金旭星.机械工程基础【M】.北京:高等教育出版社,2012. [4] 杨书评,刘颖.工业机器人系统的安全设计【G】.北京机械化研究所.2018. [5] 胡景谬,郝淑芬.工业机器人机械接口 第二部分:轴类【G】.北京机械工业自动化研究所.2006. [6] 严义,赵建勇.基于可编程控制器的工业机器人运动控制规范【G】.杭州电子科技大学.2020. [7] 廖常初. PLC 编程及应用. 机械工业出版社, 2015.
[8] 李向东.电气控制与 PLC.机械工业出版社.2004. [9] 黄祖广,杜瑞芳.工业机械电气设备及系统数控PLC编程语言【G】.北京计算机技术及应用研究所.2021.



