





















基于UG一种搬运机器人三维建模及运动仿真设计
摘要:搬运机器人主要是用在汽车维修上面的一套升起系统部装件。本次的设计任务就是设计一款搬运机器人,
本次设计的搬运机器人主要包含了运动原理分析,关键零部件的校核计算,三维建模和运动仿真以及最后
的工程图纸的输出。通过设计,使自己的使用绘图软件和查阅文献资料的能力得到了提升,为将来从事这
方面的工作打下一定的基础。
关键词:搬运机器人;运动原理 ;零件校核计算;三维建模;运动仿真
第一章 前言
1.1 课题研究背景
随着现在科技越来越发达,机器人在我们生活中扮演者极其重要的角色,也
发挥着不可比拟的作用,我们生活的各方各面都能看到机器人的身影,机器人是
多个科学学科综合生产出的产物,应用面很广,慢慢扩大,对机器人的研究以及
创新,是当下时代的一大热潮,机器人的普及程度以及发展程度已经是衡量一个
国家现代化进程的必不可少的因素,从机器人的工作环境和工作状态来看,大致
可以分为工业机器人和特殊机器人两种,工业机器人是一种性能良好,性价比高
的自动机械装置,是很典型的高科技含量很足的机电一体化产品,它在生产产品
的质量,和经济效能的改善,生产力的发展有着很重要的作用,机器人的发展也
在不断变化,越来越智能,越来越方便。节省了很多人工成本,所以,开发出更
高效,安全,智能的机器人迫在眉睫。
码垛是随着物流行业发展,越来越重要的,需求量越来越大的一个技术,目
的是为了按照一定的规则代码,将货物有序,规整的放在准备好的托盘上,将货
物的移动,搬运,保管,变成单位的作业,从而很大程度的提高物流速度,减少
出库入库所需要的时间,提高了物流效率,在产品质量不大,尺寸不大,码垛的
要求也不是很高的时候,这项任务一般都是通过人工来完成的,后来,为了增加
码垛工作的效率,出现了托盘操作员和早期的工业机器人 ,随着人们对码垛的
速度和效率要求的越来越高,码垛搬运机器人随之而产生了。
作为工业机器人里最典型的一种机器人,码垛机器人近些年发展的非常快速,
这种速度和当今世界少量布局,多种开发模式非常相似。码垛机器人工作效率高,
工作环境适应性强,体积小,应用的领域特别广泛等等优点及特点。
自上世纪 70 年代码垛领域里面出现机器人的应用以来,机器人的码垛技术,
在捕获速度,商品类型以及操作过程当中,码垛准确性以及长期工作的稳定性不
断提高,取得了突破性进展,这一优势所在,让码垛机器人的广泛应用成为无法
阻挡的趋势,前景也十分广阔.随着人类社会文明的不断发展,人们对高效的工
作方式越来越渴望,减少劳动强度的前提下完成工作,这样的劳动方式越来越受
到人们的重视。各行各业对码垛作业的需求越来越大,但传统的码垛工作的各种
弊端也显而易见,人工耗时耗力,还有很大的作业风险,机器又容易坏,工作环
境限制也很大,所以改良现有的码垛机器人迫在眉睫。
近年来,搬运机器人在各行各业的需求越来越大,物流运输行业最为典型,
自动化仓库进一步促进了码垛机器人的发展。但比较遗憾的是,目前国内的码垛
机器人比较依赖进口,国内的码垛机器人开发技术还尚不成熟,中国又是劳动密
集型发展中国家,对这样的资源需求很大。这样就导致了日益增长的需求和技术
落后的现状非常矛盾,所以开发出属于我们自己的码垛机器人迫在眉睫。
目录
第一章 前言................................................................................................................. 1
1.1 课题研究背景................................................................................................ 1
1.2 搬运机器人的发展趋势................................................................................. 2
1.3 本次课题的主要内容..................................................................................... 3
第二章 搬运机器人的概述......................................................................................... 4
2.1 搬运机器人的简介及工作原理.................................................................... 4
2.2 本次搬运机器人的方案设计......................................................................... 6
2.3 搬运机器人的设计........................................................................................ 7
第三章 结构分析与零部件设计参数计算................................................................. 9
3.1 齿轮的校核计算............................................................................................. 9
3.1.1 齿轮材料的选择.................................................................................. 9
3.1.2 齿轮材料的热处理............................................................................ 10
3.1.3 齿轮精度的选择................................................................................ 11
3.1.4 齿面强度的计算................................................................................ 12
3.2 手腕转动轴的设计计算............................................................................... 14
3.2.1 手腕转动轴的设计步骤................................................................... 14
3.2.2 手腕转动轴的材料选定.................................................................... 14
3.2.3 轴的强度校核.................................................................................... 15
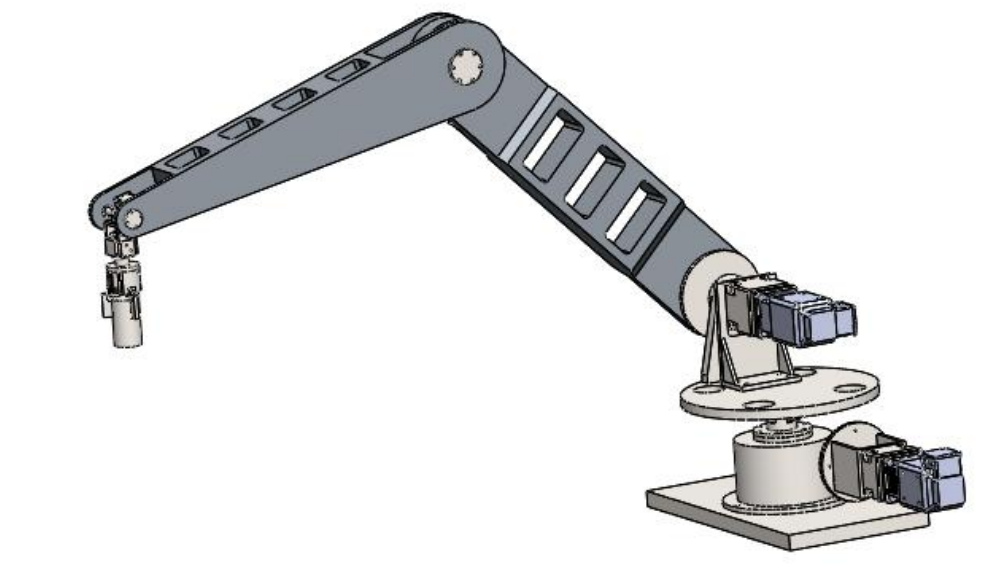
第四章 搬运机器人的三维设计与运动仿真........................................................... 17
4.1 旋转底座的三维造型.................................................................................. 18
4.2 电机连接支架的三维造型.......................................................................... 19
4.3 蜗杆的三维造型.......................................................................................... 20
4.4 连接轴承座的三维造型.............................................................................. 20
4.5 后臂的三维造型.......................................................................................... 22
4.6 其余零部件的三维造型.............................................................................. 23
4.7 零部件的装配.............................................................................................. 23
4.8 搬运机器人的运动仿真设置...................................................................... 24
4.8.1 角度的设定........................................................................................................ 25
4.8.2 时间的设定........................................................................................ 25
4.8.3 运动算例的计算................................................................................ 25
4.8.4 运动仿真的模拟................................................................................ 26
4.8.5 动画的保存........................................................................................ 27
结论............................................................................................................................. 28
致谢............................................................................................................................. 29
参考文献..................................................................................................................... 30
参考文献
[1]机械设计手册单行本联轴器、离合器与制动器.北京:机械工业出版社, 2007 年
[2]机械工程手册,机械零部件设计卷:第五卷:北京:机械工业出版社,2016
[3]施高义,唐金松,喻怀正等编,联轴器.北京:机械工业出版社, 2018
[4]汪恺主编.机械设计标准应用手册:第三卷.北京:机械工业出版社,2017
[5]李朝青.单片微机原理及应用技术[M].天津:南开大学出版社,2018. [6]宋英麟,鲜斌,茹滨超,曹美会.无人机微型姿态航向系统数据处理 J 中南大学学报.2013
[7]膝守明,鲁奕,李响.基于 STM32 芯片及 CAN 总线在汽车上的应用.无线互联科技.2013
[8]陈龙,汪国栋,刘曦明,蔡贤华,钟炎军.3D 打印技术辅助下微创内固定治疗骨盆前环骨折[0].创伤外科杂
志,2018,20(01):11-16. [9]富灵杰,郝永强. 3D 打印技术在骨肿瘤外科的现状与展望[J.中国骨与关节杂志,2018,7(01):4-6. [10]张纯妍,聂鑫.3D 打印技术在颅颌面创伤应用的相关技术与发展趋势[D.创伤外科杂志,2018,20(01):67-71. [11]王培涛,刘雨,章亮,黄正均,蔡美峰.基于 3D 打印技术的裂隙岩体单轴压缩特性试验初探.岩石力学与工程
学报,2018,37(02):364-373. [12]李刚.SolidWorks 软件在机械工程中的应用[J].机械管理开发
[13]闫俊杰.AutoCAD 在机械制图中的应用[J].电子技术与软件工程
[14]蒋艳,王菲.3D 打印的模型设计方法[J].电脑知识与技术
[15]徐志伟,丁旭东,徐祖平,孙广辉,黄澍.基于 Solidworks 软件的 3D 打印特色课程研究[J].教育现代化
[16]李宝鹿.AutoCAD 技术在机械制图中的实际应用研究[J].南方农机
[17]杨乐.AutoCAD 在机械制图教学中的应用[J].中国教育技术装备[18]陈邦玺.AutoCAD 辅助绘图工具应用
实例[J].内燃机与配
[19]胡敏蕙.3D 打印技术与 SolidWorks 软件在机械零件三维建模中的应用研究[J].内燃机与配件
[20]梁贞.AutoCAD 软件在工程制图中的应用[J].电子技术与软件工程
[21]吕刚磊,沈华刚.Solidworks 软件在《机械制图》教学中的应用[J].课程教育研究
[22]胡乐阳,田华.SOLIDWORKS 在焊接件设计中的应用[J].现代制造技术与装备



