




寻迹机器人控制系统设计
摘 要:随着科学技术的发展,机器人在社会各领域的作用越来越大。寻迹机器人无论在工业上还是在各种比赛上的作用都不可胜数。本设计采用性能优异的AT89S52单片机作为寻迹机器人的主控制器,扩展一片多功能接口芯片8155。地面和白带的检测,使用的是自己设计并制作的反射式光电传感器(又称灰度传感器),此传感器输入给控制器的信号类型是开关量。在本设计中,寻迹机器人的前面、中间和后面都布置有灰度传感器,尤其是在头部和尾部都布置了7个传感器。它们能同时工作,并可以实时采集所有灰度传感器的状态,能精确知道寻迹机器人随时的位置。在程序控制过程中,寻迹机器人可以前进和“后退”。景点检测采用前后两个碰撞开关。本设计中使用的电动机是直流电动机,驱动芯片是L298N,直流电动机经过三级直齿轮减速器将传动传给车轮。关于寻迹机器人沿线走,本设计采用了PWM调速技术,基本上可以实现直流电动机的无级调速:根据灰度传感器测出的寻迹机器人所处的位置,可以及时调整寻迹机器人理想的位置。电源使用的是高容量、小体积的锂离子电池。基于这些完备而可靠的硬件设计,再加上一套自己编的独特的程序算法,可以使本设计完全达到要求。
关键词:寻迹机器人 单片机 光电传感器 PWM
目 录
1 引言…………………………………………………………………………… 1
2 功能要求和方案论证……………………………………………………………… 2
2.1功能要求………………………………………………………………………… 2
2.1.1 功能要求…………………………………………………………………… 2
2.1.2 输入输出信号……………………………………………………………… 2
2.2 方案论证……………………………………………………………………… 2
2.2.1 车体设计…………………………………………………………………… 2
2.2.2 控制器模块…………………………………………………………………… 3
2.2.3 直流电动机驱动调速模块………………………………………………… 4
2.2.4 灰度传感器模块…………………………………………………………… 4
2.2.5 电源模块…………………………………………………………………… 5
2.2.6 景点检测模块………………………………………………………………… 5
2.2.7 最终方案………………………………………………………………… 5
3 系统硬件电路的设计……………………………………………………………………… 7
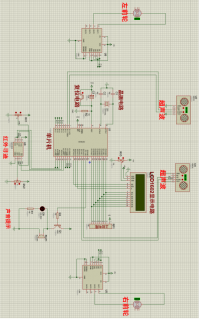
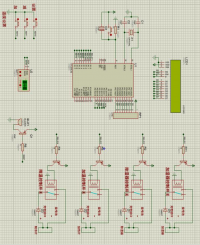
3.1 整体构思…………………………………………………………………… 7
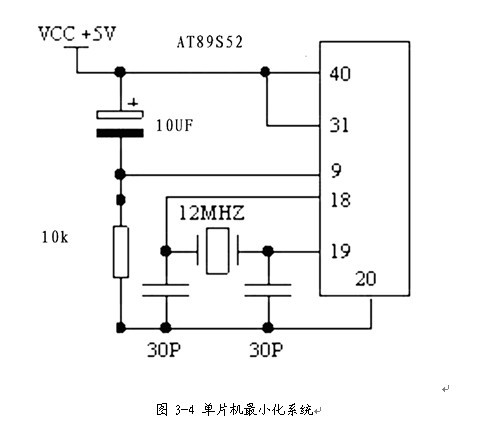
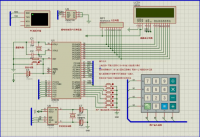
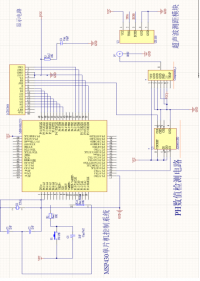
3.2 微控制器模块的设计…………………………………………………………………… 8
3.2.1 单片机选型依据……………………………………………………………………… 8
3.2.2 8155芯片的介绍……………………………………………………………………… 11
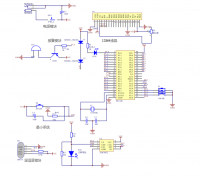
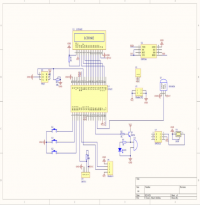
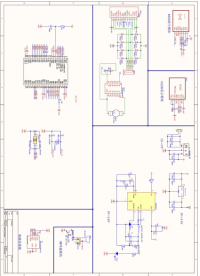
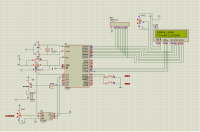
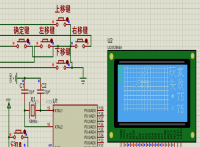
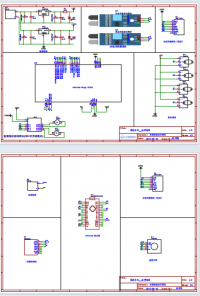
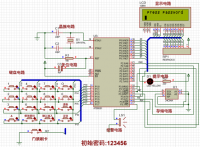
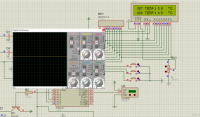
3.2.3 微控制器电路原理图………………………………………………………………… 13
3.2.4 与能力风暴机器人的控制系统比较………………………………………………… 14
3.3 灰度传感器模块的设计………………………………………………………………… 15
3.3.1 灰度传感器原理……………………………………………………………………… Y
3.3.2 灰度传感器电路设计………………………………………………………………… Y
3.3.3 灰度传感器电路原理图………………………………………………… Y
3.4 直流电动机调速模块…………………………………………………………………… Y
3.4.1 驱动芯片L298N的介绍及电路……………………………………………………… Y
3.4.2 与能力风暴机器人驱动模块的比较………………………………………………… Y
3.5 电源电路的设计………………………………………………………………………… Y
3.5.1 锂离子电池介绍……………………………………………………………………… Y
3.5.2 系统电路设计………………………………………………………………………… Y
3.6 碰撞开关…………………………………………………………………………… Y
3.7 蜂鸣器…………………………………………………………………………… Y
4 系统程序的设计…………………………………………………………………………… Y
4.1 程序功能………………………………………………………………………… Y
4.2 流程图……………………………………………………………………… Y
4.3 程序编写………………………………………………………………………… Y
4.3.1 主程序………………………………………………………………………… Y
4.3.2 灰度传感器检测子程序…………………………………………………………… Y
4.3.3 碰撞开关检测子程序………………………………………………………………… Y
4.3.4 PWM调速子程序…………………………………………………………………… Y
4.3.5 沿线走子程序………………………………………………………………………… Y
5 调试及性能分析…………………………………………………………………………… Y
5.1 调试所用到的软件……………………………………………………………………… Y
5.1.1 Protel 99 SE …………………………………………………………………………… Y
5.1.2 Keil uVision2……………………………………………………………………………Y
5.1.3 Easy 51Pro …………………………………………………………………………… Y
5.2 调试所出现的问题及解决方法………………………………………………………… Y
5.2.1 电源和控制系统……………………………………………………………………… Y
5.2.2 直流电动机 …………………………………………………………………………… Y
5.2.3 灰度传感器 …………………………………………………………………………… Y
5.3 性能分析 ………………………………………………………………………………… Y
结论 …………………………………………………………………………………… Y
致谢 …………………………………………………………………………………… Y
参考文献………………………………………………………………………………Y
附录A 寻迹机器人源程序 ………………………………………………………… Y
附录B 能力风暴机器人的源程序 ………………………………………………………… Y
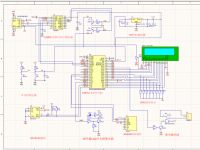
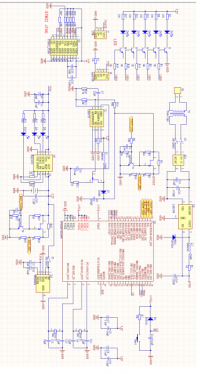
图1 寻迹机器人控制系统电路图………………………………………………………… Y
参 考 文 献
[ 1] 赵晓安,耿恒山,杨鹏.MCS-51.第1版.天津:天津大学出版社,2001.
[ 2] [日]船仓一郎,土屋 尧.机器人控制电子学.北京:科学出版社,2003.
[ 3] 李光飞,楼然苗,胡佳文,谢象佐.单片机课程设计实例指导. 北京:北京航空航天大学出版社,2004.
[ 4] 求是科技.单片机典型设计实例导航.北京:人民邮电出版社,2006.
[ 5] 张建民.机电一体化系统设计. 第2版.北京:高等教育出版社,2006.
[ 6] [美]Gordon McComb.Constructing Robot Bases.北京:机械工业出版社,2006.
[ 7] 清源计算机工作室.Protel 99 SE 原理图与PCB及仿真. 第1版.北京:机械工业出版社,2006.
[ 8] 孙和平,杨宁,白晶.单片微机原理与接口技术.北京:冶金工业出版社,2003.
[ 9] 张国安.微机控制实验与课程设计指导书. 第1版.北京:电子工业出版社,2006.
[10] 先锋工作室.单片机程序设计实例. 第1版.北京:清华大学出版社,2003.
[11] 胡钢.微机原理及应用. 第2版.北京:机械工业出版社,2006.
[12] 曾光奇,胡均安.工程测试技术基础.武汉:华中科技大学出版社,2006.
[13] 上海广茂达公司. 能力风暴智能机器人大学版AS-UII使用手册.
[14] 上海广茂达公司. 能力风暴智能机器人配件使用手册.



