




单片机实现的步进电机控制系统
—文献综述
目 录
第1章 绪论 1
第2章 方案论证比较设计 5
2.1单片机概述 5
2.2步进电机的工作原理 6
2.3单片机控制步进电机的设计思路 9
第3章 控制系统的硬件电路设计 10
3.1 SPCE061A的介绍 10
3.1.1 性能 11
3.1.2 结构 12
3.1.3芯片的引脚排列和说明 12
3.1.4 SPCE061A单片机硬件结构 14
3.1.5 μ’NspTM的核心结构 15
3.2步进电机的选择 17
3.3 步进电机的驱动电路设计 18
3.4数码管显示电路的设计 20
3.5 4X4键盘电路的设计 21
第4章 控制系统的软件设计 24
4.1 控制脉冲的产生 24
4.2 步进电机的旋转方向和时序脉冲的关系 25
4.3 步数的确定 27
4.4 步进电机的变速控制 29
4.5 语音报数 33
第5章 结论 35
参考文献 36
致谢 38
附录 39
摘 要
单片微型计算机简称单片机。它是把组成微型计算机的各功能部件:中央处理器、CPU、随机存取存储器RAM、只读存储器ROM、I/O接口电路、定时器/计数器以及串行通信接口等制作在一块集成芯片中,构成一个完整的微型计算机。单片机主要应用于控制领域,由于其具有可靠性高、体积小、价格低、易于产品化等特点,因而在智能仪器仪表、实时工业控制、智能终端、通信设备、导航系统、家用电器等自控领域获得广泛应用[1]。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,实质上是一种数字/角度转换器步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成.步进控制器由缓冲寄存器,环形分配器,控制逻辑及正,反转控制门等组成,能把输入的脉冲转换成环形脉冲,以便控制步进电机,并能进行正反向控制.但由于步进控制器线路复杂.成本高.采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加,灵活改变步进电机的控制方案,无需逻辑电路组成时序发生器.软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式并可实现一台单片机控制多台电机.提供灵活多样的控制手段和提高控制精度对复杂繁琐的控制易于实现,尤其在本系统中更显示出微机控制的优越性。
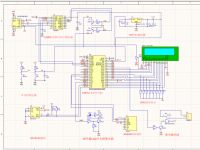
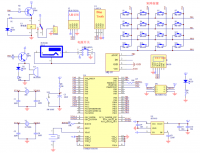
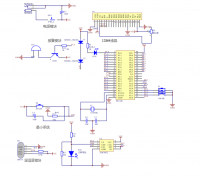
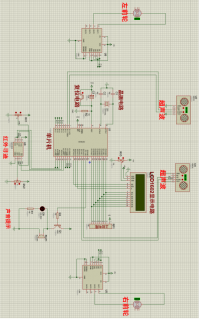
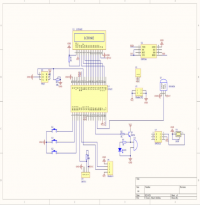
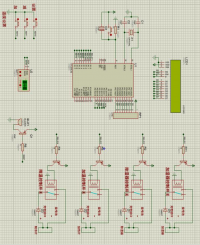
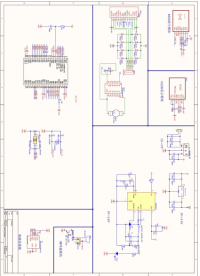
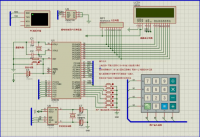
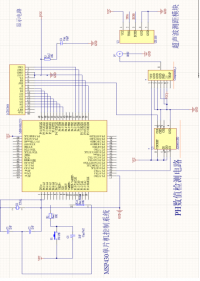
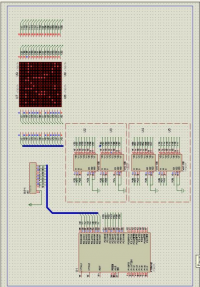
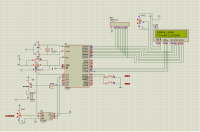
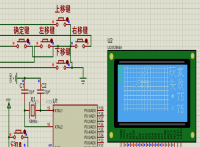
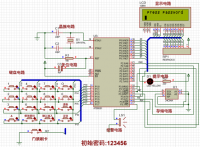
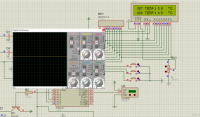
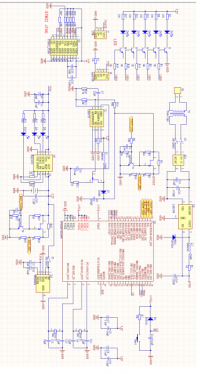
本设计采用凌阳16 位单片机SPCE061A对步进电机进行控制,通过IO口输出的具有时序的方波作为步进电机的控制信号,信号经过芯片L298N驱动步进电机;同时,用 4X4的键盘来对电机的状态进行控制,并用数码管显示电机的转速,采用74LS164作为4位单个数码管的显示驱动,从单片机输入信号;利用凌阳单片机的语音功能播报电机的转速。
关键词: 单片机 步进电机
一、引言
近十几年来,单片机在生产过程控制、白动检测、数据采集与处理、科技计算、商业管理和办公室白动化等方面获得了广泛的应用。单片机具有体积小、重量轻、耗能省、价格低、可靠性高和通用灵活等优点,因此也广泛应用于卫星定}句、汽车火花控制、交通白动管理和微波炉等专用控制上。近几年来,单片机的发展更为迅速,它已渗透到诸多学科的领域,以及人们生活的各个方面。
单片机并没有超脱冯•诺依曼原理下的计算机的结构框架和工作原则,而是着眼于应用到更广阔的范围:工业控制、数字显示、智能仪表、电子设备、汽车电控、农机、家电乃至儿童玩具的控制。它不求规模大,只求小而全。厂家在一个芯片上制成了CPU和一定容量的程序存储器和数据存储器以及一定数量的输入/输出接口(Interface)。在一个大规模集成电路芯片上构造了完整的计算机结构,故称之为单片机[5]。
MCS-51系列中的一片8751芯片,内部构造了完整的计算机硬件系统。从CPU、存储器到输入输出端口,一应俱全。只要写入程序,就可完成中央控制或数据采集、处理及通信传输的信息处理机,MCS-51单片机指令系统中为适应控制的需要设有极强的位处理功能,具有加、减、乘、除指令;CPU时钟高达12MHz,完成单字节乘法或除法运算仅需要4Ns;具有多机通信功能,可作为多机系统中的一个子系统。
一般微处理器和有关元器件分军用和民用两级,民用产品主要用于办公室及机房环境,工作温度在0到700℃ ,军用产品要求在恶劣环境条件下稳定工作,工作温度在-65到+125℃;工业级产品的性能介于以上两者之间,在-40到+85℃温度环境可正常工作。工业产品可靠性比民用产品强,而价格较军用品低。在单片机应用中,可以根据实际工作环境,选择工业级芯片,保证系统可靠性。
近年来,在国际上出现了Mechanics和electronics复合成的Mechtronics这个新词,我国译为“机电一体化”。这种机械和电子技术、信息技术紧密结合的新的学科领域是先进制造技术研究和普及的结果。机电一体化产品要实现电器控制的实时性、高可靠性、可编程和一定的人工智能。同时追求体积小、价格低,甚至低功耗等。正是针对上述种种要求而设计的单片机白然成为机电一体化控制器的最佳选择。
单片机出现的历史并不长,它的产生与发展与微处理器的产生与发展大体上同步,也经历了四个阶段[6]:
第一阶段:1971-}-1974年,4位微处理器工ntel 4004及8位微处理器工ntel 8008,这些计算机价格便宜、功能有限,只用于消耗类电子产品。
第二阶段:1974-}-1978年,初级单片机阶段,以工ntel公司的MCS-48为代表,8位单片机。
第三阶段:1978-}-1983年,高性能单片机阶段。以intel公司的MCS-51, Motorola公司的6801和Zilog公司的Z8等为代表。这一阶段推出的单片机普遍带有串行口,有多级中断处理系统、16位定时器/计数器,有的片内还带有A/D转换器接口,片内RAM, ROM容量加大,寻址范围可达64K字节。广泛应用于工业控制、外部设备控制、宏观控制、局部网络及家用计算机中。
第四阶段:1983年至今,8位单片机巩固发展及16位单片机推出阶段。例如Mostek公司的MK6800、intel公司的MCS-96等。MCS-96集成度为12万只品体管/片,寻址范围64K字节、5个8位并行口、一个全双工串行口、4个16位定时器、8通道10位A/D转换器等,另外MCS-96指令能处理位、字节、字,有16位乘16位乘法、32位除16位除法指令,一块单片计算机的功能可以和一台多片系统机相媲美。单片机己经进入一个崭新的阶段。
二、步进电机的概况
步进电动机上个世纪就出现了,它的组成、动作原理和今天的反应式步进电动机没有什么本质区别,也是依靠气隙间的磁导变化来产生电磁转矩。80年代以后,由于廉价的微型计算机以多功能的姿态出现,步进电动机的控制方式变得更加灵活多样。原来的步进电机控制系统采用分立元件或者集成电路组成的控制回路,不仅调试安装复杂,要消耗大量元器件,而且一旦定型之后,要改变控制方案就一定要重新设计电路,不利于系统的改进升级。基于微型计算机的控制系统则通过软件来控制步进电机,能够更好地发挥步进电机的潜力,因此,用微型计算机控制步进电机已经成为了一种必然的趋势,也符合数字化的时代发展要求。步进电机控制技术和普通电动机控制技术的不同之处是步进电机接受脉冲信号的控制。早期的步进电机靠一种叫环形分配器的电子开关器件,通过功率放大器使励磁绕组按照顺序轮流接通直流电源。
由于励磁绕组在空间中按一定的规律排列,轮流与直流电源接通后,就会在间隙中形成一种阶跃变化的旋转磁场,使转子步进式的转动,随着接通切换频率的增高,转速就会增大。步进电机的旋转同时与相数、分配数、转子齿轮数有关,现在比较常用的步进电机包括反应式步进电机、永磁式步进电机、混合式步进电机和单相式步进电机等。
步进电机广泛应用在生产实践的各个领域。它最大的应用是在使用数控机床的生产制造中,因为步进电机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以被认为是理想的数控机床的执行元件。早期的步进电机输出转矩比较小,无法满足需要,在使用中和液压扭矩放大器一同组成液压脉冲马达。随着步进电动机技术的发展,步进电动机已经能够单独在系统上进行使用,成为了不可替代的执行元件。比如步进电动机用作数控铣床进给伺服机构的驱动电动机,在这个应用中,步进电动机可以同时完成两个工作,其一是传递转矩,其二是传递信息。步进电机也可以作为数控蜗杆砂轮磨边机同步系统的驱动电动机。除了在数控机床上的应用,步进电机也应用在其他方面,比如作为自动送料机中的马达,作为通用的软盘驱动器的马达,也可以应用在打印机和绘图仪中等等。
步进电机的原理[7]:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、 停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。为此,CS51测试网在腾龙开发套件中首次引入了步进电机技术,方便用户应用掌握。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
三、控制系统的设计
单片机控制步进电机的程序的编制
步进电机控制程序设计的主要问题有三个:
第一,控制脉冲的产生;
第二,步进电机的旋转方向和时序脉冲的关系;
第三,步数的确定。
作为单片机控制步进电机的程序的构成也是主要由这几个问题,因此可以从这三个问题入手:
1、控制脉冲的产生
在单片机控制步进电机时,一般来讲,控制脉冲是用软件产生的。方法是先输出一个高电平,然后延时,再输出低电平,再进行延时。延时时间的长短由步进电机的土作频率决定。
2、步进电机的旋转方向和时序脉冲的关系
步进电机旋转方向与内部绕组的通电顺序和通电方式有关。现在常用的通电方式主要有三种:
1)三相单三拍:A-B-C-A;
2)三相双三拍:AB-BC-CA-AB;
3 )三相六拍:A-AB-B-BC-C-CA-A。
按以上顺序通电,步进电机正传,按相反方向通电,步进电机反转。
因此,产生时序脉冲的方法是:
(1)利用单片机8751的P1端口,即用P1.0, P1.1, P1.2分别控制三相步进电机的A, B, C三相绕组;
(2)根据控制模式写出控制模型;
(3)按控制模型的顺序向步进电机输入控制脉冲。
3、步数的确定
步进电机运行的步数可由步距角和需要转过的角度来计算[7]:
式中: -步距角;
-转子齿数;
-拍数(一般三拍时 = 或六拍时 =2 );
-控制绕组相数, =3。
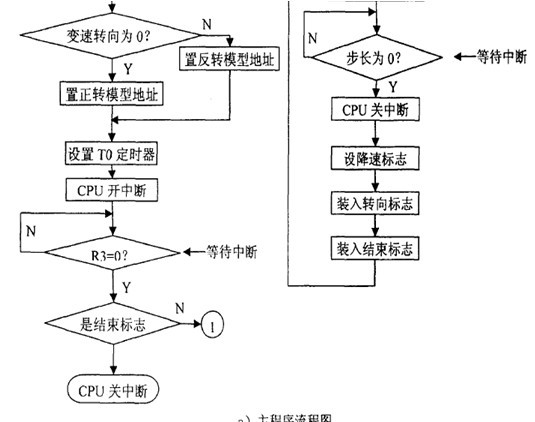
4、步进电机的变速控制
上面给的程序流程图是步进电机的恒速运转方式。一般来讲,步进电机的一个弱点,就是运行中丢步,为了使步进电机在运行中不出现丢步现象,一般要小于或等于步进电机“响应频率”人,在该频率下,步进电机可以任意启动、停止或反转而不发生失步现象。这个频率通常比较低。当步进电机走过的距离比较长时,需要低速启动,高速运转,然后降低速度,最后停止。这样就解决了“快速而不失步”的矛盾。那么实现变速控制的基本思想是改变控制频率。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机的特性有:
1,步进电机必须加驱动才可以运转, 驱动型号必须为脉冲信号,没有脉冲的时候, 步进电机静止, 如果加入适当的脉冲信号, 就会以一定的角度(称为步角)转动。转动的速度和脉冲的频率成正比。
2,腾龙版步进电机的步进角度为7.5 度,一圈360 度, 需要48 个脉冲完成
3,步进电机具有瞬间启动和急速停止的优越特性。
4,改变脉冲的顺序, 可以方便的改变转动的方向。
四、结论
总而言之,用单片机来控制步进电机,它的优点是体积小、重量轻、耗能省、价格也低,比起用PLC控制的可靠性高,通用灵活,方便简洁,只需输入程序来控制步进电机的状态,自动化程度高,精度高,在生产制造中得到充分的应用,是比较实用的一种控制系统。
参考文献
[1] 《单片机基础》 北京航空航天大学出版社 李广弟 朱月
[2] 《单片机应用程序设计技术》 北京航空航天大学出版社 周航慈编
[3] 《微型计算机控制技术》[M]北京:清华大学出版社,1999版。于海生等编
[4] 《MCS-51系列微型计算机原理与应用》北京航空航天大学出版社 李巡编
[5] 《MCS-51单片机应用设计》 哈尔滨工业大学出版社 张毅钢编
[6] 《MCS-51/98单片机原理与应用》 机械工业出版社 赵长德 李华 李东编
[7] 《步进电机应用技术》 北京航空航天大学出版社 周航慈编



