




基于STM32单片机两轮自平衡小车
摘要:双轮自稳机器人是一类非线性多变量强耦合且参数不确定的复杂系统,其尺寸小、结构简单、动作灵活,适用于狭窄的环境,是验证多种控制方案的理想设备,已引起国内外学者的广泛关注,也是极具挑战的研究方向。
二轮自平衡桥式车辆系为二个车轮左右平行排列之结构。与以往的倒立类似,其基本思想是通过倾斜度传感器探测到的姿态、位置变化率,并利用相应的控制方法,使之保持平衡。在此基础上,建立了一种新的倒立摆系统模型,并对其进行了仿真分析。由加速计及陀螺感测器得到的角。利用卡尔曼滤波器对陀螺的偏摆及加速度传感器的运动偏差进行了校正,获得了较好的俯仰角逼近结果。利用光电编码器将车辆的直线速度、转向角速率进行 PI调节。通过 PID调整参数,使双车轮能够垂直行走。通过调整两个轮子的速度差来完成汽车的转弯。在此基础上,通过无线蓝牙通信,可以进行前后、左右方向的移动。另外,在一般情况下,该小车能够实现自动的平衡。而且在一定程度的扰动下,该系统还可以自动调节,快速地回到稳态。
关键词:自平衡 陀螺仪 控制调试
Two-wheeled self-balancing trolley
ABSTRACT:Two rows which are self-stabilized robots are a type of non-linear complex system, combine more variables strongly and unsafe parameters. They have small size, simple structure, flexible actions and are suitable for small environments. They are an ideal tool for checking more control schemes and have also used internationalisation and internationalization. They are also a very bad selection direction.A two-row balancing usage transport system itself is a structure which sets a simple parallel in the two rows. Similar to traditional handling, the base used by star sensors to detect location and position changes and use the corresponding control methods to keep balances. On this basis, a new converted pension system model was created and simulated for analysis. The angle of the accelerator space and the Giroscope sensor. The Kalman filter was used to adjust the giroscope and the movement of the accelerator space and obtain the results of a good pixel of connection. With PI, you can use a camera trick encoder to adjust the linear speed and speed of the transport. Adjust the parameters using the PID to go vertical the two rows. Adjust the speed difference between the two pieces of the auto.On this basis, you can move the function Bluetooth communication to the front, back, left and right of the movement. Automatic image balance can also be obtained in general. The system can also automatically adjust and move fast to the state.
Key words: self-balance, gyroscope control and debugging
目录
第1章 项目任务 4
1.1 项目概述 4
1.2 项目内容 4
1.3 预期结果 5
第2章 方案设计 6
2.1 主控芯片的选择 6
2.2 电机驱动的选择 6
2.3 陀螺仪的选择 7
第3章 平衡车控制原理 8
3.1 控制系统要求分析 8
3.2 平衡控制原理 9
3.3 平衡车数学模型 9
3.4 PID控制原理 13
3.5 PWM调速原理 15
第4章 硬件设计 16
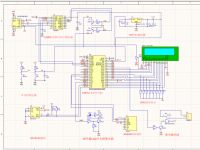
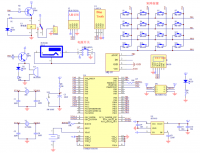
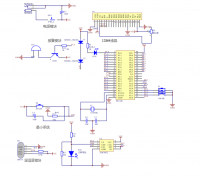
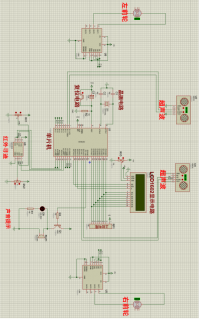
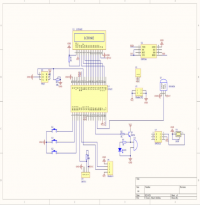
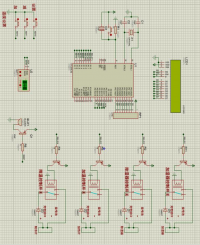
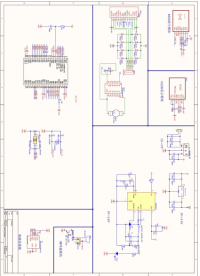
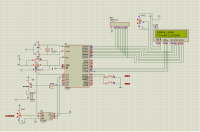
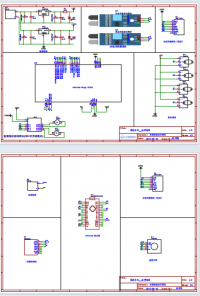
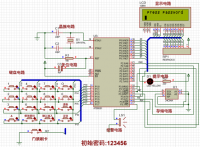
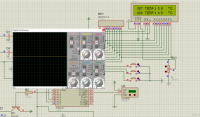
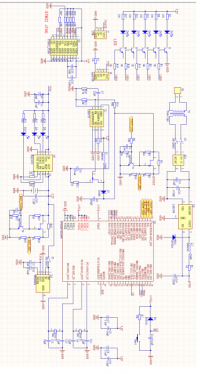
4.1 电路原理图 16
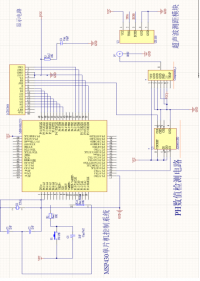
4.2 主控芯片的电路设计(stm32) 16
4.3 电机驱动的电路设计(TB6612FNG) 17
4.4 陀螺仪的电路设计 18
4.5 编码器电路设计 19
第5章 平衡车结构设计 20
5.1 元件清单及成本 20
5.2 三维建模 20
第6章 软件设计 23
6.1 程序框图 23
6.2 源代码 24
第7章 实验测试 33
7.1 keil软件简介 33
7.2 测试过程及结果 33
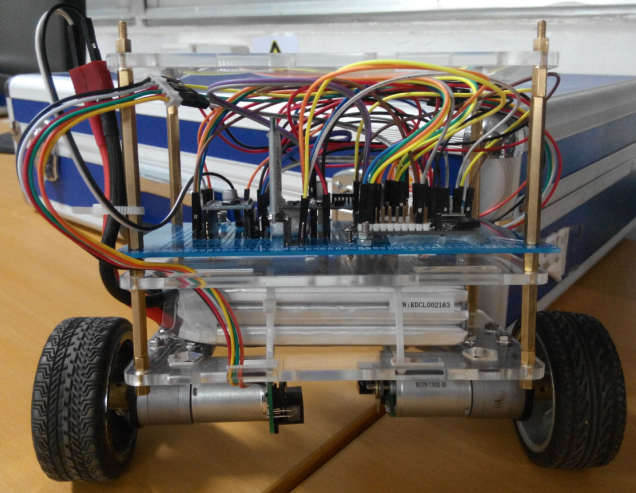
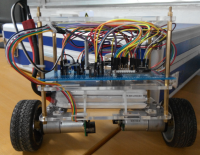
7.3 最终实物图 34
结论 36
致谢 37
参考文献 38
第1章 项目任务
1.1项目概述
行走机器人是机器人学科中的一个主要研究方向,其研究始于二十世纪六十年代,主要有轮式、足式、履带式和水下行走等。由于两个因素,移动机器人的迅速发展,首先,它的适用范围不断扩大;二是计算,感知,控制和执行等领域的迅速发展。由于目前在移动机器人领域还有很多需要攻克的技术难题,所以近年来国内外对其进行了大量的研究。
近几年,由于对移动机器人技术的研究日益深入,其应用范围不断扩大,其所面对的工作环境和工作要求也日益复杂。在这种相对复杂的情况下,机器人往往会面对许多大角度的空间,因此,对于机器人来说,在这种较为复杂的情况下,能够快速、高效地完成工作,是一个值得关注的问题。基于此,提出了一种新型的两轮自主平衡式机器人。双轮自平衡器属于极不稳定的两轮移动机械臂,属于多变量、非线性和强耦合的复杂非线性系统,是验证多种控制方案的有效手段。同时,其体积小,机动灵活,转弯半径为零,在军事与民事方面都具有广阔的发展空间。由于具有重要的学术和实际应用价值,近年来国内外多家机构对两轮自主平衡行走机构进行了研究。
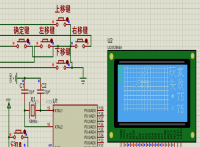
本论文主要研究了具有不稳特性的两轮车的自均衡控制问题。利用无线蓝牙技术实现了车辆的前进,后退,左右转弯等基础操作。
1.2项目内容
(1) 双车轮自平衡车的驱动线路的开发。对电机、传感器及单片机进行了适当的选型,并对相关的周边线路进行了合理的设计,最后实现了两轮自平衡车的硬件实现。
(2) 对驱动电路板进行了测试。通过对驱动脉冲、 D/A输出和无负载测试,从性能上证明,该驱动电路基本上达到了设计指标。
(3)对所述传感器的数据进行处理。本文选择了惯导系统中的陀螺和加速度传感器作为研究对象,对其工作机理及分别应用时出现的问题进行了较为详尽的阐述。
(4) 对自动均衡小车的运动轨迹进行了研究。最后完成了车辆的左右转弯,前进,倒车等功能。
1.3预期结果
(1)具有较强的自衡性,能够自主地探测自己机构的倾斜角度,实现对位姿的调节;
(2)具有较强的载荷承载力,当装载某一重物时,它可以迅速地进行调节,并保持其本身的平衡;
(3)具有可调整的转速,可以在各种移动速率下完成两轮驱动系统的前进、后退、左右转动等操作;
(4)具有无线通信的能力,可以对两个车轮自动平衡小车进行无线遥控操控。
参考文献
[1]霍晓丽. 云明.单片机原理与应用(C语言版),:清华大学,2022.12.
[2]周兴妮. 书名[M]. :电子科技大学,2022.12.
[3]永元,洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].:西北工业大学,2021.
[4] 薛涛.单片机与嵌入式系统开发方法[M].:清华大学,2021.10.
[5] 谭浩强.C程序设计[M].:清华大学,2022.
[6] 周丰,王南山,卉.C语言教程[M].:华中科技大学,2021.
[7]于庆广,葵,王冲等.光电编码器选型及同步电机转速和转子位置测量[J].电气传动,2022.



