




基于Arduino Mage 2560运料机械手臂设计
摘要:本课题主要研究如何在工业中用机械手臂实现物料的运输,本文提供了设计方法及硬件与软件的设计,通过起点与终点的光电传感器来控制小车的停止与出发,再通过Arduino Mage 2560控制机械手臂舵机协同运作来夹取物料,最后达到稳定运输的目的。该装置可以广泛的应用到运输行业,对于近距离的运输极其方便,极大的提高了生产效率,帮助完成对人类有害的繁琐任务。
关键词:光电传感器;物料;舵机;运输
Design of material conveying manipulator
Abstract: this topic mainly studies how to use the mechanical arm to realize the transportation of materials in the industry. This paper provides the design method and the design of hardware and software. Through the photoelectric sensor of the starting point and the end point to control the stop and start of the car, and then through Arduino mage 2560 to control the cooperative operation of the mechanical arm and the steering gear to clamp the materials, finally to achieve the purpose of stable transportation. The device can be widely used in the transportation industry, which is extremely convenient for short distance transportation, greatly improves the production efficiency, and helps to complete the tedious tasks harmful to human beings.
Key words: photoelectric sensor, material, steering gear, transportation
目 录
第一章 绪论 4
1.1课题的背景及意义 4
1.2国内外研究现状 4
1.2.1国内研究现状 4
1.2.2国外研究现状 5
1.3技术特点及可行性分析 5
1.4课题研究的内容 6
1.5论文结构 6
第二章 运料机械手臂系统的总体设计 8
2.1运料机械手臂系统整体方案设计思路 8
2.2传感器方案的选定 10
2.3微处理器的选用 12
2.4舵机的作用 13
2.5直流电机小马达 13
2.6机械手抓取方式选择与设计 14
2.6.1液压夹紧抓取 14
2.6.2气动夹紧抓取 14
2.6.3电磁铁抓取 14
2.6.4选择方案 14
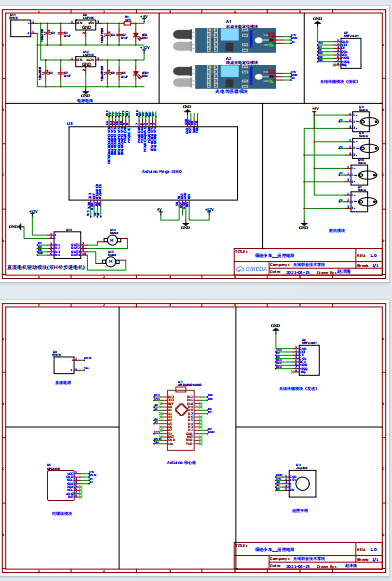
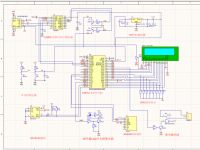
第三章 运料机械手臂系统的硬件设计 16
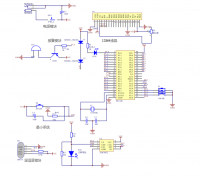
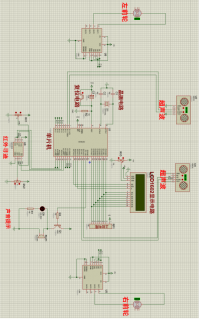
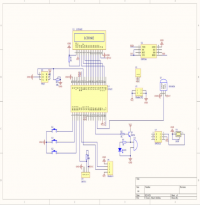
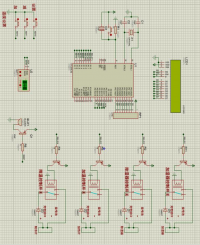
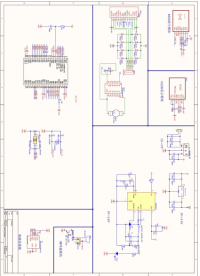
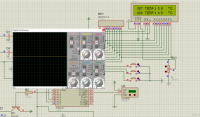
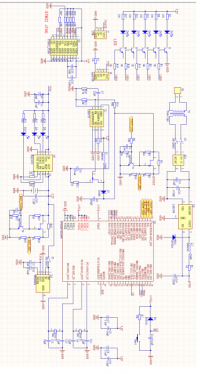
3.1运料机械手臂系统硬件简述 16
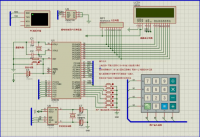
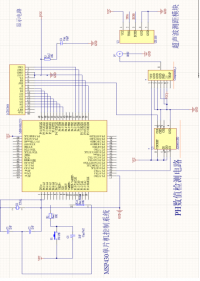
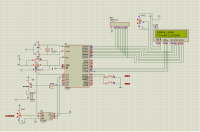
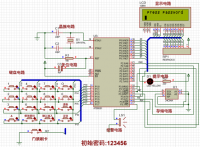
3.2单片机控制模块 16
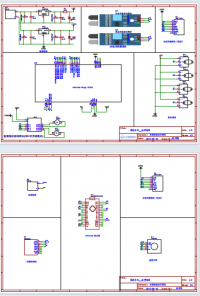
3.3无线发送模块和接收模块电路 17
3.4陀螺仪模块设计 17
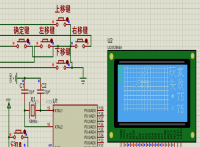
3.5舵机模块 18
3.6起点终点的光电检测模块 19
3.7电源模块 20
第四章 运料机械手臂系统的软件设计 21
4.1运料机械手臂系统软件设计思路 21
4.2小车主程序流程图 21
4.2舵机控制机械手臂流程图 22
4.3舵机的工作模式流程图 22
4.4无线收发模块软件设计 23
第五章 总结与展望 25
致谢 27
参考文献 28
第一章 绪论
1.1课题的背景及意义
二十一世纪以来,随着科技的发展越来越迅速,工业机器人极大程度上对人类的生活方式带来便捷,越来越多地被应用于生产制造、机械零件加工以及货物搬运等领域,能替人类完成危险枯燥无味的工作,工厂基本已经实现半自动化甚至全自动化,极大的提高了生产效率。它可以完成对人类有害的繁琐任务。工厂基本可以实现半自动化甚至全自动化,大大提高了生产效率。机械臂正变得越来越广泛地使用并吸引了人们的注意。它不仅可以用于机械工业中的零件组装,还可以用于加工零件的加工和卸载,尤其是在自动CNC和模块化加工中。当前,机械臂正成为柔性生产系统FMS的重要组成部分,它是一种技术复杂、高自动化的系统,适用于中、小批量的生产,加工精度高,加工形式稳定,可实现连续的“无人化生产”,有利于提高产品质量,更好的适应市场竞争。而我国目前的柔性自动生产线技术与国外还有一些差距,因此,本课题中物料运输机械臂的研究与设计具有十分重要的意义。
1.2国内外研究现状
1.2.1国内研究现状
我国目前机械手臂的生产厂家排名靠前的有博力实delta机器人有限公司,该公司的主要研究项目是通过机器人视觉系统的位置和输送线方法实现对机器人的识别以及对目标工作位置和姿势的准确掌握,从而提高劳动生产率。机械包装取代了手工包装,可确保产品不与人体直接接触,缩短了产品在空气中的暴露时间,并确保了产品的清洁度。。紧随其后的是上海KUKA的机器手臂,其中KR 3 AGILUS的有效载荷为3公斤,最远可达距离为541毫米,紧凑的尺寸让它获得了最高的每平方米生产率,在同级别中是最快的机械手臂且成本低、易于维护且可靠性高;而KR QUANTEC 机器人属于高负载级别,它的有效载荷为120-300公斤,有效距离可达2700-3100毫米,它拥有过程优秀的运动序列与较大的灵活性,以及可持续的低总体拥有成本(TCO)因而广受好评。而第三位则是abb的焊接机器人产业,IRB 4600工业机械手臂是一款拥有6关节的非常高效的通用机器人,它使生产单元布置更紧凑,实现了产能与质量的双提升,让生产效率迈上了新台阶。之后北京发那科机器人、新松机器人都是我国机械手臂的顶尖研究水准的代表。
1.2.2国外研究现状
不同于国内,在国外1967年,英国的莫林斯公司就首次提出了FMS的基本概念,即在数控车床内部控制机械手臂来完成自动化操作,同样在1967年的美国,怀特·森斯特兰公司建成Omniline I系统,用来操控机械手臂按固定顺序以一定频率在各机床间传送和进行加工,以灵活的自动生产线闻名的日本,苏联和德国也开发了FMS。 1967年,日本发那科开发了第一个由加工中心和工业机器人组成的柔性生产单元(FMC)。这为FMS的未来发展提供了重要的形式。直到1982年,日本的发那科建立了自动电动机处理系统。一个由数个灵活的生产单元和一个三维仓库以及两个载有毛坯和工件的自动导引小车组成的车间,还有一个无人驾驶汽车装配厂。至此之后,国外的机械手臂技术与设计思想得到普及应用,向着全自动化工厂迈出了重要一步。
参考文献
[1] 高瞻宇,顾营迎,刘宇航,徐振邦,吴清文.采用简化Brown模型及改进BFGS法的相机自标定[J].光学精密工程,2017,第25卷,第9期
[2] 随婷婷,王晓峰.一种基于视觉知识加工模型的目标识别方法[J].自动化学报,2016,第42卷,第5期
[3] 全燕鸣,黎淑梅,麦青群.基于双目视觉的工件尺寸在机三维测量[J].光学精密工程,2013,第4期
[4] 瞿志强,杜岳峰,朱忠祥,郎健,毛恩荣.基于Rank变换的农田场景三维重建方法[J].农业工程学报,2015,第31卷,第20期
[5] 李海鹏,邢登鹏,张正涛,徐德,张大朋.宏微结合的多机械手微装配机器人系统[J].机器人,2015,第37卷,第1期
[6] 陈科尹,邹湘军,彭红星,梁海英,胡元闯.基于半实物仿真的采摘机器人视觉定位研究[J].系统仿真学报,2017,第29卷,第8期
[7] 项荣,应义斌,蒋焕煜,彭永石.基于双目立体视觉的番茄定位[J].农业工程学报,2012,第28卷,第5期
[8] 吴凤和.基于计算机视觉测量技术的图像轮廓提取方法研究[J].计量学报,2007,第1期
[9] 刘俸材,谢明红,王伟.双目视觉的立体标定方法[J].计算机工程与设计,2011,第4期张昕妍
[10] 魏晓霞,蒲小琼,冯常.基于水下爬行机器人的机械手结构设计[J].机械,2015,第4期
[11] 王璇,刘涛,高波.水下机械手的研发现状及发展趋势[J].机电产品开发与创新,2012,第3期
[12] 王承禧.水下机械手结构设计的几个问题[J].海洋工程杂志,1987,第1期
[13] 安江波,孙昌将,凌华.水下机械手结构设计与研究[J].机械工程与自动化,2009,第2期
[14] 钟先友,谭跃刚.水下机器人动密封技术[J].机械工程师,2006,第1期
[15] 钟先友,谭跃刚.水下机器人动密封技术[J].电机技术,2006,第4期
[16] 魏晓霞,蒲小琼.基于水下爬行机器人的机械手结构设计机器人技术[J].机械,2015(4):77-80
[17] 张昕妍.中国水下机器人的诞生与样机化发转模式浅析[J].科技和产业.2015,7;67-81



