





















封焊机自动上料机械手的设计.
摘要
本文以实际工程项目“封焊机”为背景,设计封焊机自动上料用操 作机械手,该机械手具有抓取物体等功能,能够在各种环境中执行抓取任务。
本文设计了操作机械手的机械结构,完成了操作机械手的总装图绘制,使用 CAD 对操 作机械手进行绘制,并根据分析操作机械手的各种力学参数,讨论了其工作空间的情况。 同时对其进行动力学分析,得到各传动关节所需的驱动功率。
本文最后提出了操作机械手的末端执行器和整体工作的控制策略,为今后开展机械手
控制器的设计提出了一种思路和解决方案。
关键词 操作机械手;运动学;工作空间;动力学
目 录
1 绪论 ………………………………………………………………………1
1.1 机械手发展状况 …………………………………………………………1
1.1.1 发展历史 …………………………………………………………………1
1.1.2 现代研究趋势 ……………………………………………………………2
1.1.3 国内发展状况 …………………………………………………………2
1.1.4 应用举例 ………………………………………………………………3
1.2 课题背景及研究意义 ……………………………………………………5
1.3 应用价值 …………………………………………………………………5
2 机械手设计要求及驱动方式 …………………………………………7
2.1 机械手设计的基本要求…………………………………………………………6
2.2 驱动方式 ……………………………………………………………………6
2.2.1 液压驱动……………………………………………………………………7
2.2.2 气压驱动 …………………………………………………………………7
2.2.3 电机驱动 …………………………………………………………………7
3 封焊机自动上料机械手的组成 ………………………………9
3.1 自动上料机械手的规格参数 ………………………………………… 9
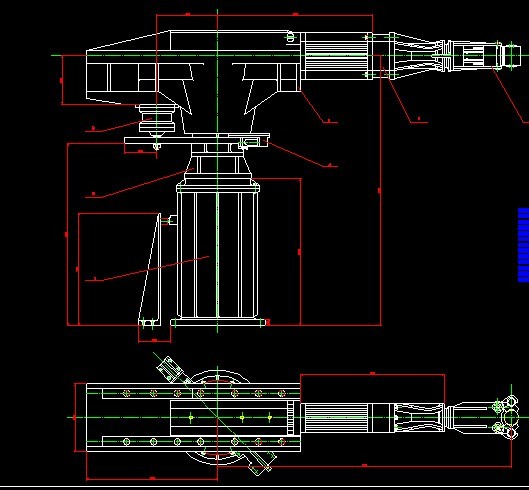
3. 2 自动上料机械手的结构组成 ……………………………………………10
3. 3 机械手结构 ………………………………………………………………14
3. 3.1 手部结构 ………………………………………………………………14
3.3.2 腕部结构 ………………………………………………………………15
3.3.3 臂部结构 ………………………………………………………………15
4 机械手设计与计算 ………………………………………………………17
4. 1 机械手材料 ……………………………………………………………17
4.1.1 机械材料选用原则 …………………………………………………17
4.1.2 零件材料 ………………………………………………………………19
4. 2 传动方式 ……………………………………………………………19
4. 2. 1 带传动 ………………………………………………………………19
4. 2. 2 链传动 ………………………………………………………………22
4. 2. 3 齿轮传动 ………………………………………………………………20
4.2.4 蜗杆传动 ………………………………………………………………20
4.3.机械手手部设计:…………………………………………………………21
4.3.1 手部结构 …………………………………………………………21
4.3.2 夹紧力计算 ……………………………………………………22
4.3.3 夹持误差 ………………………………………………………22
4.3.4 机械手腕部设计 …………………………………………………22
4.3.5 手臂的设计计算 …………………………………………………22
4.4 液压缸结构尺寸 …………………………………………………………23
4.5.液压缸壁厚计算 …………………………………………………………24
4.6 机械手转轴强度校核 ………………………………………………………26
4.7 机械手联结键校核 ………………………………………………………28
4.8 传动轴校核 ………………………………………………………………29
4.9 轴承校核 …………………………………………………………………32
5 机械手控制策略 ……………………………………………………………34
5.1 末端执行器控制策略 ……………………………………………………34
5. 2 机械手控制策略 ……………………………………………………………35
6 结论与展望 ………………………………………………………………38
6.1 结论 ……………………………………………………………………… 38
6.2 展望 …………………………………………………………………………38 致谢 ……………………………………………………………………………39 参考文献 ………………………………………………………………………40
7 翻译 ………………………………………………………………………41
中文原文 ………………………………………………………………………41
英文翻译 …………………………………………………………………………44
参考文献
[1].张福学 机器人技术及其应用.北京:电子工业出版社,2000 [2].蒋新松 Robotics.沈阳:辽宁科学技术出版社,1994 [3].王承义 机械手及其应用.北京:机械工业出版社,1981
[4].何发昌 邵远 多功能机器人的原理及应用.北京:高等教育出版社,1996 [5].王华坤 范元勋 机械设计基础.北京:兵器工业出版社,2000
[6].邱宣怀 机械设计 第四版.北京:高等教育出版社,1997 [7].郑志峰 链传动设计与应用手册.北京:机械工业出版社,1992 [8].唐世恭 李慧中 工程材料及成型工艺.北京:兵器工业出版社,1996 [9].徐锦主 机械设计手册.第 3 卷.北京:机械工业出版社,1995 [10].王特典 工程材料.南京:东南大学出版社,1996
[11].马香峰 机器人机构学.北京:机械工业出版社,1991 [12].郑洪生 气压传动.北京:机械工业出版社,1981 [13].季明善 液气压传动.北京:机械工业出版社,2002




