





















Robotstudio软件工业机器人搬运货物的虚拟试教与编程
摘要: 本论文主要研究的就是搬运货物的虚拟示教与编程。目前,随着工业的进步,越来越需要符合当前工业的搬运设备。现如今,一些工厂不重视货物搬运的效率以及安全问题,常常有搬运工作中断的情况发生。所以如何快速有效的建立搬运货物系统,来优化搬运货物的运行效果,降低运行成本,对于搬运货物行业至关重要。通过Robotstudio软件的应用,来模拟货物搬运的实际场景,完成货物搬运系统的设定,完成搬运货物程序调试与任务示教、以及货物搬运作业仿真视频录制。离线编程能够方便地实现轨迹优化,减少超程、碰撞、奇异点等错误,大大提高编程质量,改善编程环境来降低风险,确保了编程者的安全。并通过创建精确的路径来提高工作效率。本毕业设计编写的离线程序是通过操作示教盒进行编写的,主要完成的是以货物搬运平台的建立、货物与组件的设定以及搬运货物时路径的规划、应用功能打包等技术实现,并录制机器人仿真运行动画。
关键词:工业机器人;离线编程;虚拟仿真;超程;
Virtual Trial Teaching and programming of industrial robot handling goods
Absrtact:This paper mainly studies the virtual teaching and programming of moving goods. At present, with the progress of industry, more and more need to meet the current industrial handling equipment. Nowadays, some factories do not pay attention to the efficiency and safety problems of goods handling, and often have the interruption of handling work. Therefore, how to quickly and effectively establish the handling goods system, to optimize the operation effect of handling goods, reduce the operation cost, is very important for the handling goods industry. Through the application of Robotstudio software, to simulate the actual scene of cargo handling, complete the setting of the cargo handling system, complete the debugging of the cargo handling program and task teaching, and the simulation video recording of the cargo handling operation. Offline programming can easily realize trajectory optimization, reduce overrange, collision, singularity and other errors, greatly improve the quality of programming, improve the programming environment to reduce risks, and ensure the safety of programmers. And improve work productivity by creating precise pathways. The offline program written in this graduation design is written through the operation instruction box, which is mainly completed by the establishment of cargo handling platform, the setting of cargo and components, the planning of cargo handling path, application function packaging and other technologies, and record the robot simulation operation animation.
Keywords: Industrial robot; offline programming; virtual simulation; overrun;
目 录
第一章 绪论 1
1.1研究背景及意义 1
1.2国内外研究现状 2
1.3本文研究内容 3
第二章 货物搬运机器人仿真平台搭建 5
2.1虚拟仿真机器人型号选择 5
2.2仿真机器人基础硬件结构 5
2.3虚拟仿真平台硬件设计 8
2.3.1底座的设计 10
2.3.2平台与物料的导入 11
2.3.3机器人模型导入 13
2.3.4夹具导入 14
第三章 货物搬运机器人仿真系统设计 19
3.1仿真与编程的流程图设计 17
3.1.1 Smart组件设计 18
3.1.2 I/O信号 20
3.1.3工作站逻辑设计图 22
3.2 工业机器人系统设计 25
第四章 系统仿真与编程 27
4.1货物搬运所用的指令语言 27
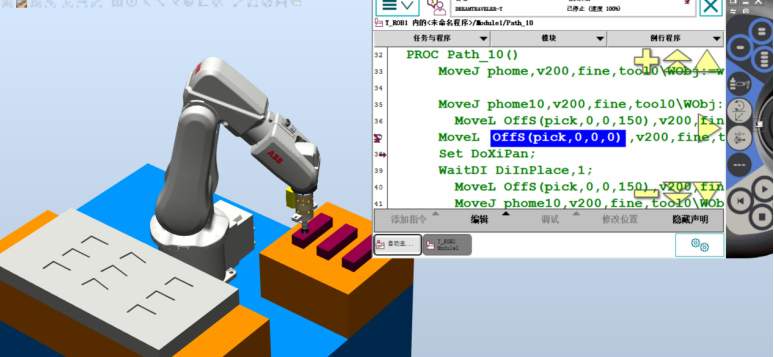
4.2仿真程序编辑 27
4.2.1程序注释 31
4.2.2仿真结果展示 31
4.2.3仿真操作步骤 33
4.2.3仿真视频 36
第五章 结论 37
致谢 38
参考文献 39
附录 40
第一章 绪 论
工业机器人是根据编写好的程序,来自动执行工作任务的一种机器系统,它结合了机械、传感器、电子、计算机等多种学科技术,以模拟、延伸和扩展人的作业能力为目的。随着机器人应用领域越来越广,功能也越来越丰富,它的出现大大减轻人类劳动的强度,减少人力成本,提高了生产的效率。随着技术的不断发展,工业机器人能够通过离线编程或示教方式实现高度自动化,从而在工业生产线上执行各种搬运、焊接、装配、检测等多种复杂作业。
1.1研究背景及意义
机器人是现代自动进行控制研究领域发生的尖端技术,它能通过预先编写好的程序进行运动,用来完成重复性高、繁重的装配和搬运工作,能减轻工人的体力负担。减少劳动强度的同时使人类工作更加轻松、高效和安全。其优点是,它能不知疲倦的持续工作,大大提高生产率和效率;还不需要支付工资、保险等费用,减少了人力成本;它具有优秀的安全性能,能够与人类工作者安全地协同工作;具有精准操作能力和灵活性,使其在各种生产环境中发挥着无比重要的作用。
搬运机器人的研发与应用,就是用来自动化地搬运和处理重物的,为了使机器人能完成各种搬运任务,需要安装各不相同的末端执行器,才可使不同的工作任务得以完成,都是由操作者通过安装来实现的。搬运机器人的出现,减少了人类的体力劳动。在工业生产线、仓储物料、码垛搬运、集装箱自动搬运等多种应用领域,这些邻域都有搬运机器人的应用。这些搬运机器人大大提高了生产效率,在各产业中发挥着关键作用。因此,搬运机器人的研究和开发具有重大意义,在未来市场也有一席之地,并且具有广泛的应用场景。
在现在的技术下,随着工业互联网技术的整体发展越来越好,生产过程智能化的趋势愈发明显,智能化的车间管理也备受制造业的重视。数字孪生和虚拟仿真技术为制造业提供了许多优势和机遇,都是基于数字化技术构建的虚拟系统,主要的应用场景和目的不同。而对工业机器人的运动仿真需要进行研究与开发,可提高机器人的运动性能和稳定性。一方面,可用于机器人运动仿真的教学和培训,优化机器人运动轨迹规划在仿真系统中的应用。可预先验证操作作业程序,预先检查运行轨迹的正确性与安全性,避免在操作机器人运动时发生碰撞,减少不必要的损失,降低成本。另一层面,提供开放的实验平台是非常有益的,可以学习机器人运动控制的方法,提高学生实践的能力和技能,它在实验平台的教学和培训中发挥着重要作用。
1.2国内外研究现状
近年来,我国货物搬运机器人行业发展迅速,已经成为全球最大的搬运机器人市场。国内企业在技术研发、产品创新、市场拓展等方面取得了显著成就。目前,国内的货物搬运机器人已经在很大程度上实现了自动化、智能化,不仅能在复杂的环境中进行高效的搬运工作,而且还能实现自主导航、精准定位、避障等功能。然而,我们也应看到,尽管国内货物搬运机器人行业发展迅速,但与国际先进水平做对比后,我发现国内发展仍存在一定差距,譬如,在一些关键的核心技术、关键零部件等方面,我们还需进一步加强自主研发和创新。
相较于国内,国外的货物搬运机器人发展更早,技术更为成熟。国际知名的机器人制造商如ABB、FANUC、KUKA等,都拥有先进的搬运机器人技术,其产品在全球范围内享有很高的声誉。这些国际巨头在技术研发、产品创新、市场拓展等方面,都具有丰富的经验和实力。他们的搬运机器人不仅在性能上更优越,而且已经广泛应用到各个行业和领域。他们通过云计算、大数据、人工智能等技术的更新,进一步使搬运机器人更加智能,而完成工作的智能化、自动化水平更高。
1.3本文研究内容
ABB公司提供的RobotStudio仿真软件很实用,本文所用的虚拟仿真软件就是这个。在虚拟仿真工作站中进行建模、仿真与分析,用于缩短实际工作的编程时间,在实际工作时,可在仿真软件中进行工作任务的离线编程,通过虚拟的可视化的界面,对工作布局进行规划。工作风险的降低对于企业来说至关重要,通过用可靠的、确定性的解决方案,来进行风险的管理,以精确的路径来减少生成误差并保证产品质量合格。本论文研究的主要步骤及方法有:
(1)分析虚拟仿真存在设计的主要问题,收集货物搬运机器人的相关资料。
(2)建立仿真工具,将机器人与环境模型进行装配。
(3)编写机器人货物搬运的程序,做好运动路径规划。
(4)根据要求完善工作站,创建出合适的工件与工作平台。
(5)根据要求进行设定相应的仿真场景。
(6)修改Smart姿态组件并完成属性设定,更清晰的认识工作站逻辑设定的方法。
(7)根据仿真目标与场景,编写对应的控制程序。
(8)运用RobotStudio对编程程序进行优化,多次调试和验证。



