


直进轮式管道机器人的设计
摘 要
管道运输在我国运用比较普遍,管道长期处于压力大的恶劣环境中,受到水、油混合物、硫化氢等有害气体的腐蚀。这些管道受蚀后,管壁变薄,容易产生裂缝,造成漏油的问题,存在重大安全生产隐患和济济损失。因此研究工程应用中的管道机器人具有很高的实用价值和学术价值。
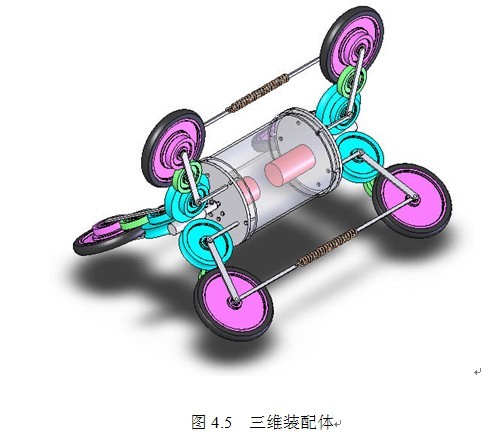
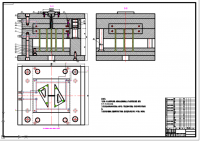
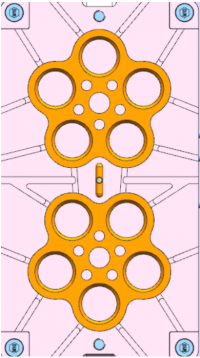
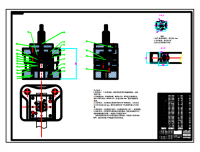
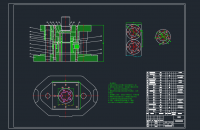
根据这些问题,我们设计一种新的行走机构并分析了其总体机械结构。本文进一步介绍了当前国内外的管道机器人的发展现状并提出了一种新的管内行走机构。它利用一个电机同时驱动均布在机架上并与管内壁用弹簧力相封闭的六个行进轮,从而实现了可以轴向直进全驱动的管内行走。
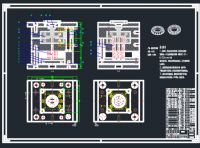
接着本论文重点对直进轮式管道机器人的运动机理和运动特征进行了分析和介绍。根据管道机器人的设计要求选择电机,介绍了电机选择过程,对其中关键的机械部件如蜗轮蜗杆传动部件、齿轮等进行了设计。该机器人具有较大的承载能力,可以在较高的速度下实现连续移动,由于该机构采用弹性装置支撑,所以该机构的管径适应性增大,是一种具有实用价值的移动机构形式。
关键词:管道机器人;行走机构;弹性装置
目 录
摘要 I
Abstract II
1绪论 1
1.1本课题的研究目的和意义 1
1.2国内外管道机器人的发展状况 2
1.3国内外管道机器人的发展趋势 8
1.4论文的研究内容 10
2管道机器人总体方案设计 11
2.1实现管内行走的几种典型机构 11
2.1.1螺旋轮式 11
2.1.2蠕动式 12
2.1.3直进轮式 13
2.2直进轮式全主动管内机器人的运动机理 17
3管道机器人的移动机构分析与设计 18
3.1管道机器人管内行走的基本条件 18
3.2直进轮式移动机构分析 19
3.2.1轮式移动机构的原理 19
3.2.2轮式移动机构的特点 19
3.3直进轮式移动机构的运动分析 21
3.3.1运动自由度分析 21
3.3.2运动速度分析 21
3.4移动机构的受力分析 23
3.4.1受力分析时的一些假设条件 23
3.4.2移动机构前进时的受力分析 24
3.5直进轮式移动机构设计计算 27
3.5.1直流电机的选择 27
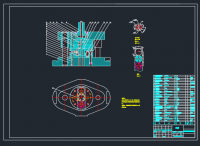
3.5.2传动部位的设计计算 29
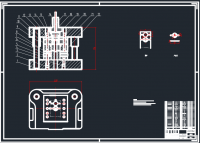
3.5.3机架的设计 31
3.5.4标准件选择 31
3.5.5拉伸弹簧的设计 32
3.6管道机器人在管道中运动通过性分析 32
3.6.1曲率半径大小的影响 32
3.6.2微型管道机器人适用的管道口径 33
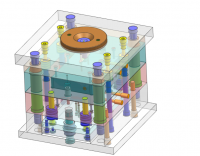
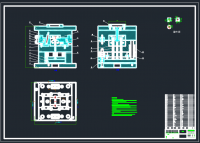
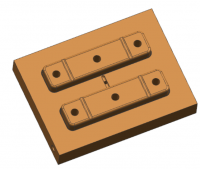
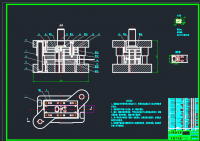
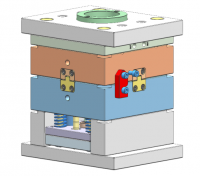
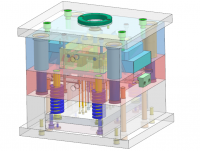
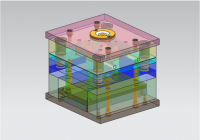
4直进轮式管道机器人实体建模 34
4.1Solidworks软件简介 34
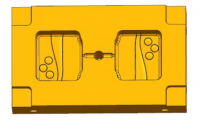
4.2关键零部件的实体建模过程 35
4.3主要部位的连接 36
4.4装配图的实现 37
5总结 38
参考文献 40
致谢 41
附录 42
参考文献
[1]谢文彬,杨建国,李蓓智,宋立博.管道检测机器人的研制.机械工程师,2005,14~16
[2]田海晏,薛龙,孙章军.直进轮式微型管道机器人的行走系统设计.北京石油化工学院学报,2006,14(2):33~36
[3]唐德威,梁涛,姜生元,邓宗全,于伟真.机械自适应管道机器人的机构原理与仿真分析.机器人,2008,30(1):29~33
[4]邓宗全.管内作业机器人的发展与展望.机器人,1986,(6):471~478
[5]邓宗全,王杰,刘福利,李笑,陈明.直进轮式全驱动管内行走机构的研究.机器人,1995,17(2):121~122
[6]杨占平,李笑,邓宗全.管道机器人机构综述.中国机械工程学会机械工业自动化分会论文集,1993,144~147
[7] Kawaguchi Y,Yoshida I,etc .Internal pipe inspection robot[A] .Pro-ceedings of the 1995 IEEE International Conference on obotics&Au-tomation[C],1995,857-86
[8] Scholl KU,KepplinV,etc.An articulated service robot for autonomous sewer inspectionTasks[A].Proceedingsofthe 1999 IEEE/RSJ Interna-tional Conference on Intelligent Robots and Systems[C] .1999.1075~1080
[9]甘小明,徐滨士等.管道机器人的发展现状[J].机器人技术与应用,2003 (6):5210
[10]马荣朝,秦 岚,潘英俊.微小管道机器人移动机构运动学与动力学特性[J].重庆大学学报,2002,25 (7):26229
[11]马荣朝,潘英俊,秦岚.小口径管道用机器人行星齿轮式行走机构设计[J].农业机械学报,2003,24 (3):109-111。




