





















3-DOF工业机器人的结构设计
摘要:在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
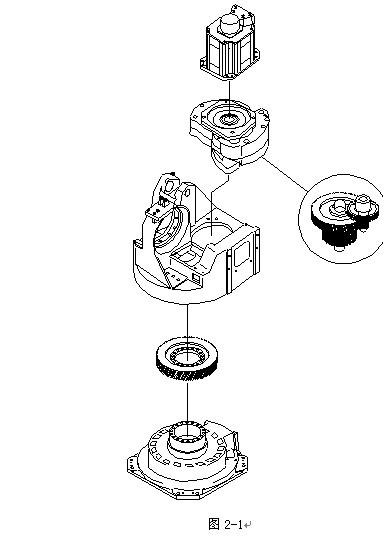
本设计介绍了关于工业机器人的一些基本常识和原理,包括工业机器人的组成、分类、主要技术性能参数和工业机器人的运动分析,并参考通用型工业六自由度机器人的结构。根据对工业六自由度机器人的总体结构及传动系统的分析和探讨,进行三自由度工业机器人的结构设计。关键在于三轴(臂)的传动系统的设计以及整体的结构设计,避免运动的干涉,在本次设计中主要负责第一臂与底座的结构设计及其传动原理,对第一臂与底座的各零部件的结构设计。
关键词:三自由度 机器人 传动原理 控制
在加速科技进步中,机械制造业的发展起着关键的作用,其任务是在工业生产中迅速将工艺装备的独立单元变为自动化综合体(自动化工段,生产线和自动化车间),将来甚至实现自动化工厂。这种自动化生产最重要的特点是具有柔性,它能预料到,在节省劳力(或无人)情况下,根据工艺条件调整装配,以适应多种产品生产。
当代柔性自动化生产的建立和广泛应用,取决于作为科技进步的催化剂的机床制造、机器人技术、计算机技术、微电子技术、仪器制造等技术的加速发展。工业机器人是多品种的经常更换产品的生产过程自动化的通用手段。在机械制造中,工业机器人既有效地用于柔性生产系统组成工艺装备的基本工序中,也有效地用于辅助操作中。工业机器人与传统自动化手段不同之处,首先在于它在各种生产功能上的通用性和重新调整的柔性。在柔性生产系统中,工业机器人广泛应用于数控机床、锻压机床、铸造机械和仓储设备上,以完成传送装备和其它操作。工业机器人和基本工艺装备、辅助手段以及控制装置一起形成各种不同形式的机器人技术综合体—柔性生产系统基本结构模块。
随着工业技术和经济的惊人发展,标志着多品种中、小批量生产最新水平的FMS(柔性制造系统),FA(工厂自动化)技术更加引人注目;作为FMS、FA技术重要组成之一的工业机器人技术也将得到迅速发展。应用工业机器人是提高生产过程自动化,改善劳动环境条件,提高产品质量和生产效率手段之一。
本次设计是根据对工业六自由度机器人的总体结构及传动系统的分析和探讨,进行三自由度工业机器人的结构设计。关键在于三轴(臂)的传动系统的设计以及整体的结构设计,避免运动的干涉。在本次设计中主要负责第一臂与底座的结构设计。
在设计中许瑛老师给予了很大的指导和帮助,在此谨致谢意。
限于水平,本设计难免有缺点、错误,恳请各位老师批评指正。
参考文献
1.孙桓 等主编.机械原理(第六版) .高等教育出版社,2001
2.马香峰 主编.工业机器人的操作机设计. 冶金工业出版社 ,1996
3.宗光华 张慧慧译.机器人设计与控制. 科学出版社 , 2004
4. 郑笑级 工业机器人技术及应用[M]. 北京:煤炭工业出版社,2004
5.Y.Fujimoto and A.kawamura.Autonomous Control and 3D Dynamic Simulation walking Robot Incuding Environmental Force Interaction. IEEE Robbtics and Automnation Magzuine,1998,5(2):33~42
6.刘庆国,刘力 编著.计算机绘图.高等教育出版社, 2003
7.濮良贵 主编, 机械设计(第八版). 高等教育出版社, 2006
8.马香峰 等编著, 工业机械手的操作机设计. 冶金工业出版, 1995
9.日本机器人学 会编, 机器人技术手册. 科学出版社, 1996
10.付京逊、C•S•G李 编,机器人学. 中国科学技术出版社, 1989
11.张建民 主编, 工业机器人. 北京理工大学出版社, 1987
12.[俄]IO•M索尔 编,工业机器人图册. 机械工业出版社, 1991
13.Huang Z.Wang J Identification of principal screw of 3-DOF parallel manipulators by quadric degeneration 2001
14.Herve J M The lie group of rigid body displacements,a fundamental tool for mechanism design 1999
15.Cai G Q.Hu M.Guo C Development and study of a new kind of 3-DOF tripod 1999(1)
16.Hunt K H Structural kinematics of in-parallel actuated robot-arms 1983(11)
17.Siciliano B Tricept robot:inverse kinematics,manipulability analysis and closed-loop direct kinematics algorithm 1999(4)
18.Romdhane L Design and analysis of a hybrid serial-parallel manipulator 1999(7) [10] 19.熊有伦. 机器人学[M]. 北京:机械工业出版社, 1993.
20. John J Craig 著. 机器人学导论(原书第3 版)[M]. 贠超等(译) 北京:机械工业出版社, 2006.
21.宋伟刚.机器人机械系统原理、理论方法和算法[M].沈阳:东北大学出版社,2001.




