
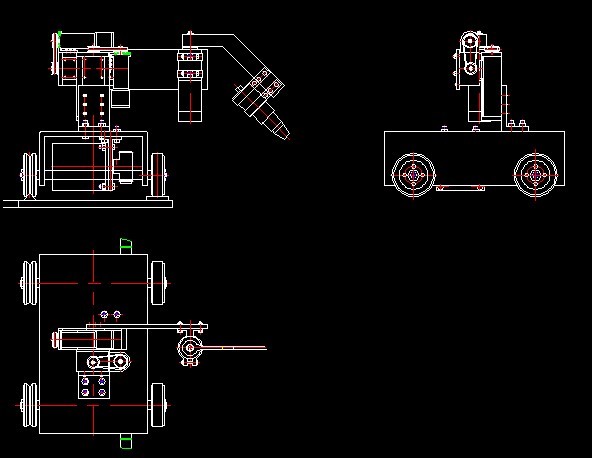


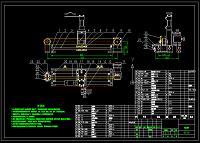
集装箱波纹板焊接机器人机构运动学分析及车体结构设计
一、 选题的依据及意义:
依据:针对集装箱波纹板焊接自动化水平低的现状:目前用于焊接集装箱侧板与顶侧梁、底侧梁的自动焊专机,由于在焊接过程中,焊枪不能随波形的变化调整与焊枪速度的夹角(焊接工艺参数也未有变化),直接导致焊缝成形不能保持一致,进而影响焊缝的质量。
意义:该课题能有效的解决焊接过程中焊枪速度与波形夹角的问题,使焊接速度始终与波形垂直,进而保证焊接的稳定性,提高焊接成形的一致性,提高焊接质量。
二、 国内外研究现状及发展趋势(含文献综述):
由于该课题所研究的集装箱焊接是自动焊接技术在该处的工业应用,故此处的研究现状及发展趋势(含文献综述)应该是关于自动焊接技术的。
焊接技术的目的就是为了提高焊接质量。而焊接质量是采用焊接工艺制造的产品的焊接接头使用性能是否满足产品设计的要求。一般焊接产品焊接接头使用性能的主要内容有:力学性能,内、外部缺陷,产品焊接后几何尺寸等。
而目前在焊接过程中,还不能做到在线和实时地检测和控制这些直接焊接质量,在现阶段所能做的是利用自己的感观或现有的传感技术,对一些与直接焊接质量有关的间接焊接质量,在焊接过程进行在线和实时的检测和控制。比如该课题就是做到提高焊接的稳定性,来保证焊缝成形一致,进而提高焊接质量。这里稳定性就属于间接焊接质量。
间接焊接质量虽然不能直接说明焊接接头的使用性能,但他们却在一定程度上或者与直接焊接质量存在着定量关系。
这可以从当前的研究现状得到验证。
1、开发机器人的视觉系统来检测间接焊接质量,有一定的仿生性,利用感观。光学图像的视觉信息具有形式直观、信息丰富、适应性强等优点。
有的文献综述了焊接机器人传感系统的研究现状,比较了目前常用的焊接机器人传感技术,重点分析了被动视觉技术和基于激光三角测量原理的主动视觉技术在焊接中的应用,并给出了国内外的开发实例。
有的文献简述了机器人焊接中视觉系统的分类、原理、特点及实用性,综述了视觉系统在机器人焊接领域的典型应用,并指出了其应用中存在的问题及其发展趋势。
的确,在环境恶劣的焊接现场中,具有视觉功能的智能焊接机器人显然有大显身手的机会。
有的文献分别从焊接过程控制和质量控制这两方面介绍焊接区视觉信息在弧焊机器人传感和控制技术的研究和应用现状。提出了几点视觉信息系统的现存问题和解决途径。
2、利用现有的传感技术对弧焊过程进行实时传感与控制,这里包括弧焊过程电弧稳定性方面的传感与控制,弧焊过程焊接对缝传感与跟踪控制,焊缝尺寸的传感与控制。
有的文献介绍了国内外焊接质量实时传感与控制方面一些共性问题的研究和发展,包括弧焊过程电弧稳定性方面的传感与控制、焊接对缝传感与跟踪控制、焊缝尺寸的传感与控制。这些内容有的是作者研究组的研究工作,部分选自国内外同行近年来在刊物和会议上发表的论文。这些都是作者认为比较成熟,有的已经应用,有的很有应用前途。
将移动机器人技术和焊缝跟踪技术结合起来构成移动式的焊接机器人,在大型结构件的自动化焊接中,有着广阔的应用前景。有的文献研究了移动焊接机器人的关键技术。并对移动焊接机器人在国内外的研究现状及发展趋势进行了比较全面地介绍。
的确,这样能够实现大型复杂焊接结构件的自动化焊接,无疑将大大减轻工人的劳动强度,减少人为因素的影响,提高产品的生产效率和保证焊接质量。而现代先进制造技术的发展,对焊接产品提出了更高层次的要求。
有科研工作者研制了一种能重复跟踪焊缝轨迹线的CCD光电跟踪系统。此系统由新颖的CCD视觉传感器来实时检测机器人行走机构与焊枪的跟踪位置偏差量,并根据此由微机控制系统实现对机器人行走机构与焊枪的二级自动跟踪。本文还就视觉传感系统的物距、光强等主要影响因素进行了分析研究,使之具有较高的可靠性与适应性。
3、关于机器人的关节结构设计未来的发展趋势是微型化、精密化、模块化
有的文献提到过转动关节的模块化机构设计,很显然如果能够像现在的标准零部件那样的设计机器人的关节,那将多么的有利于机器人应用的普及,将在更广泛的程度上范围服务于人类,极大的提高人们的生活水平。
学士学位论文要求装订成册并应包含以下主要内容
一、 毕业设计(论文)任务书
二、开题报告
三、南昌大学学士学位论文原创性申明
四、毕业设计(论文)
1、中文摘要
2、外文摘要
3、毕业设计(论文)全文
五、外文资料原文
六、外文资料译文
六、 参考文献:
[1]郑相锋,胡小建.弧焊机器人焊接区视觉信息传感与控制技术[J].电焊机,2005,6:34.
[2]孔宇,戴明,吴林.机器人结构光视觉三点焊缝定位技术[J].焊接学报,1997,3:188.
[3]王军波等.基于CCD传感器的球罐焊接机器人焊缝跟踪[J].焊接学报,2001,4:31.
[4]徐培全等.基于机器人焊接的视觉传感系统综述[J].焊接,2005,8:11.
[5]刘苏宜,王国荣,钟继光.视觉系统在机器人焊接中的应用与展望[J].机械科学与技术,2005,11:1296.
[6]张柯等.移动焊接机器人的研究现状及发展趋势[J].焊接,2004,8:5.
[7]王其隆.弧焊过程质量实时传感与控制[M].北京.机械工业出版社,2000.2.
[8]陈雪华,梁锡昌.基于模块化关节的机器人结构设计和运动学分析[J].2005,2:4.





