



工业机器人的在线示教编程
摘要:在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
工业机器人有示教编程和语言编程两种编程方式。示教编程又分为手把手示教编程和示教盒示教编程。适用于重复操作型,所面对的作业任务比较简单的机器人。语言编程方式适用于动作复杂,操作精度要求高的工业机器人(如装配机器人)。
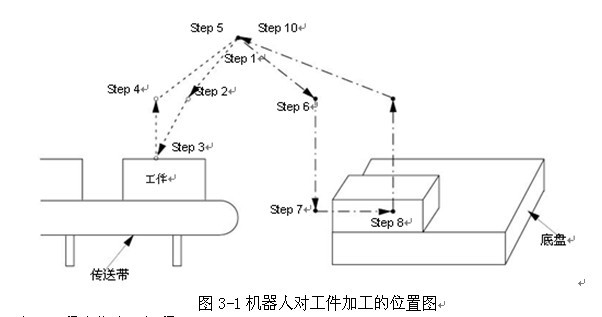
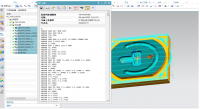
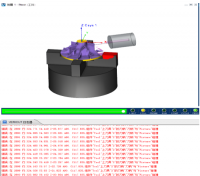
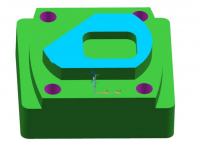
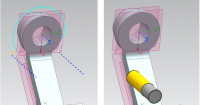
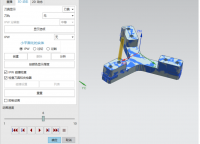
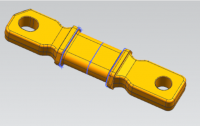
本文将编写机器人示教再现程序,实现压气机壳在CL20A数控车床缓冲区上不同工位间的移位。有效地提高整个机器人系统的性能及开发效率。
关键词:工业机器人;示教编程;CL20
目 录
摘要
1引言……………………………………………………………………………………10
1.1工业机器人的发展及分类………………………………………………………10
1.2工业机器人的应用………………………………………………………………13
1.3 工业机器人控制的特点及其分类………………………………………………14
2 机器人编程示教………………………………………………………………………17
2.1示教的分类………………………………………………………………………17
2.1.2直接示教……………………………………………………………………17
2.1.3离线示教……………………………………………………………………18
2.1.3虚拟示教编程………………………………………………………………18
2.2机器人语言分类及其语言系统的构成…………………………………………18
2.2.1机器人语言分类……………………………………………………………19
2.2.2机器人语言系统的组成……………………………………………………19
2.3示教系统…………………………………………………………………………20
2.3.1示教系统的组成……………………………………………………………20
2.3.2示教系统的设置……………………………………………………………21
2.3.3示教程序的输入……………………………………………………………24
3工业机器人在线示教编程应用实例…………………………………………………24
3.1实例一……………………………………………………………………………24
3.1.1简要说明……………………………………………………………………24
3.1.2示教程序步骤解释…………………………………………………………25
3.1.3测试…………………………………………………………………………28
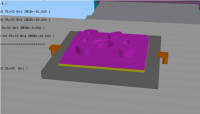
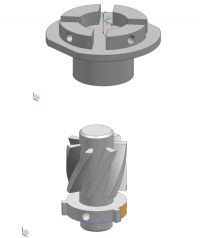
3.2实例二……………………………………………………………………………29
3.1.1简要说明……………………………………………………………………29
3.1.2示教程序步骤解释…………………………………………………………29
3.1.3测试…………………………………………………………………………30
5参考文献…………………………………………………………………………………34
参考文献
[1] Craig, John J. Introduction to robotics. 北京 机械工业出版社,2006
[2] Basilio Bona and Aldo Curatella. Identification of Industrial Robot Parameters for Advanced Model-Based Controllers Design Proceedings of the 2005 IEEE
International Conference on Robotics and Automation. Barcelona, Spain, April 2005
[3] 张爱红,MOTOMAN机器人在线示教编程方法,2005
[4] 周伯英. 工业机器人设计. 北京 机械工业出版社,1995
[5] 郭洪红 贺继林 田宏宇 席巍. 工业机器人技术. 西安电子科技大学出版社,2006
[6] 三浦宏文. 机电一体化实用手册. 科学出版社 OHM社,2001
[7] 陈国联 王建华 夏建生. 电子技术. 西安交通大学出版社,2002
[8] 沈裕康 严武升 杨庚辰. 电机与电器. 北京理工大学出版社,2002
[9] 罗建军 朱丹军 顾刚 刘路放. 大学C++程序设计教程. 北京:高等教育出版社,2004
[10] 罗建军 崔舒宁 杨琦. 大学Visual C++程序设计案例教程. 北京:高等教育出版社,2004



