





















4-DOF SCARA 机器人结构设计与运动模拟
摘要:工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。
本文设计了一个工业用SCARA机器人。SCARA机器人(全称Selectively Compliance Articulated Robot Arm)很类似人的手臂的运动,它包含肩关节肘关节和腕关节来实现水平和垂直运动。它是一种工业机器人,具有四个自由度。其中,三个旋转自由度,另外一个是移动自由度。它能实现平面运动,具有柔顺性,全臂在垂直方向的刚度大,在水平方向的柔性大,广泛用于装配作业中。
本文用模块化设计方法设计了SCARA机器人的机械结构。分析了SCARA机器人的运动学正解和逆解,建立了机器人末端位姿误差计算模型并做了运动模拟。
关键字: SCARA 位姿误差
目录
第一章绪论 1
1.1引言 1
1.2 国内外机器人领域研究现状及发展趋势 1
1.3 SCARA机器人简介 2
1.4平面关节型装配机器人关键技术 4
1.4.1操作机的机构设计与传动技术 4
1.4.2机器人计算机控制技术 4
1.4.3检测传感技术 5
1.5项目的主要研究内容 6
1.5.1项目研究的主要内容、技术方案及其意义 6
1.5.2拟解决的关键问题 7
第二章SCAAR机器人的机械结构设计 7
2.1 SCARA机器人的总体设计 7
2.1.1 SCARA机器人的技术参数 7
2.1.2 SCARA机器人外形尺寸与工作空间 7
2.1.3 SCARA机器人的总体传动方案 8
2.2机器人关键零部件设计计算 10
2.2.1减速机的设计计算 10
2.2.2电机的设计计算 11
2.2.3同步齿型带的设计计算 11
2.2.4滚珠丝杠副的设计计算 13
2.3大臂和小臂机械结构设计 14
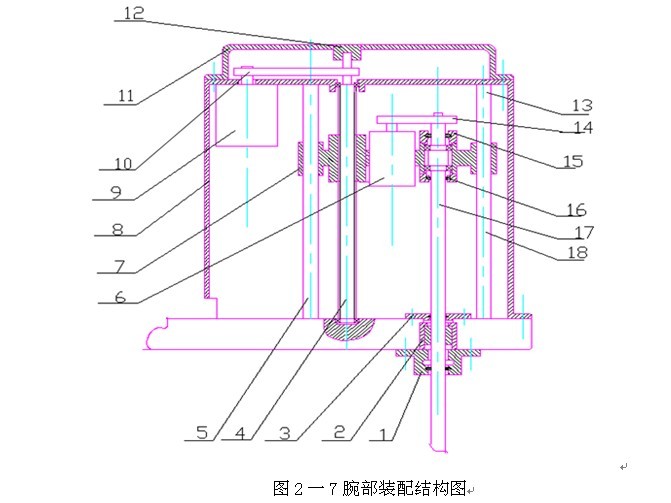
2.4腕部机械结构设计 16
2.5小结 17
第三章SCARA机器人的位姿误差建模 17
3.1基于机构精度通用算法的机器人位姿误差建模 17
3.2机构精度通用算法 18
3.2.2通用机器人位姿误差模型 20
3.2.2.1机构通用精度模型与机器人位姿误差模型的联系 20
3.2.2机器人位姿误差模型的建立 20
3.3 小结 25
总结 26
参考文献 27
致谢 28
参考文献
【1】熊有伦.机器人技术基础【M】.武汉:华中科技大学出版社,1996
【2】王坤兴.机器人技术的发展趋势III【J】.机器人技术与应用,2005.6
【3】吴宗泽.机械设计【M】,北京:人民交通出版社,2003
【4】李蕾,崔建国.精密机械设计【M】.北京:化学工业出版社,2005.2
【5】赵松年,张奇鹏.机电一体化机械系统设计【M】.北京:机械工业出版社,1996
【6】唐颖莉,郑时雄,刘桂雄.基于墒概念的机器人动态误差理论的研究一一误差源的研究及其对位姿方程的影响.机械科学与技术.2001(5)
【7】陈志翔,黄勇,殷树一言,卢振洋.弧焊机器人离线编程系统分析与设计【J】. 机械工程学报,2001、’01.37No.10P.104一106
【8】杜浩藩,丛爽等.一种用于搬运和装配作业的4自由度机器人系统【J】.制造业自动化,2003.7
【9】 贾庆贤,杨磊等.机器人模块化关节的设计与实现【J】机电产品开发与创新,Vol.18No.6,(2005),1~4
【10】明谈世哲,杨汝清,开放式机器人运动学分析与动力学建模【J】组合机床与自动化加工技术,2002
【11】王仲民,蔡霞,崔世钢一种四自由度机器人的运动学建模【J】.天津职业技术师范学院学报.v。2.13No.4,(2003),1一5
【12】焦国太,余跃庆,梁浩.机器人位姿误差的结构矩阵分析方法【J】.应用基础与工程科学学报.2001.9,259一265
【13】黄家贤.机构精确度【M】.第2版.西安:西安电子科技大学出版社,1994
【14】肖郑进.SCARA平面关节式装配机器人精度分析.南京理工大学学报.2002
【15】」阎华,刘桂雄,郑时雄.机器人位姿误差建模方法综述.机床与液压(2001)
【16】基于PC一BASED的新一代数控系统,步进机电有限公司
【17】高钟敏.机电控制工程(第2版) 【M】.清华大学出版社,2002:176一177
【18】张爱红,张秋菊.机器人虚拟示教的实现方法.机床与液压.2003.No.4
【19】许春山,王建平,曹广义,赵锡方.基于VISu1aC++6.0的机器人控制系统软件实现【J】,中国科技论文在线
【20】Aspinwall D M .Acceleration profiles for miniming residual response ,ASMEJ. Of dynamic
Systems, measurement ,and control.1986.102;3-6
【21】Jankowski KP.Invese。Dynamies task comtrol of Flexible Joint Robots一Partl: Continuoutime APProaeh,Part11:Diserete一time APProaeh,Meehanism Maehine Theory,1992
【22】TanGuan一zheng,Liang Feng,Wang Yue一Chao.Real一time aceurate handpath
Traekin gand joint trajeetory Plannin go frindu strialrobots(I)【J】Journalof Central South Universit of Teehnology (EnglishEdition),2002,9(3):191一196
【23】TanGuan一zheng,HuSheng一Yuan.Real一time aeeurate hand path traekingand
Join ttrajeetory Plannin of rindustrial robots(I) 【J】.Journal of Central South University of Teehnology (EnglishEdition),2002,9(3):273一278




