





















五自由度上下料机械手的结构设计.
摘 要
工业机械手是模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。分析了以上原因,可以对工业机械手进行设计和研究,减轻劳动负担,提高生产效率,发挥其优越性。
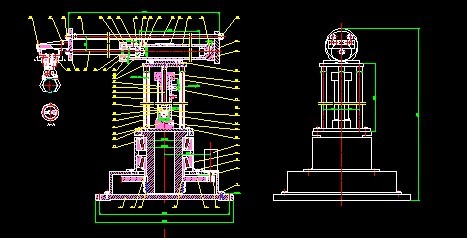
设计了数控机床配套的上、下料机械手。应用AutoCAD 技术对机械手进行结构设计和液压传动原理设计,并进行运动仿真,使其能将基本的运动更具体的展现在人们面前,实现自动上、下料运动;通过理论分析和实际计算,对各部分设计进行验证和校核,使其更具可靠性;应用PLC技术对机械手电路部分进行原理设计,做好PLC的外部接线、I/O地址分配,并进行程序设计,可实行手动调整、手动及自动控制功能。
关键词:上下料机械手;PLC控制;液压缸
目 录
摘要 Ⅰ
Abstract Ⅱ
第1章 引言 1
1.1 选题背景 1
1.2 设计目的 1
1.3 国内外研究现状和趋势 1
第2章 设计方案的论证 3
2.1 机械手的总体设计 3
2.1.1 机械手总体结构的类型 3
2.1.2 总体结构设计具体采用方案 4
2.2 机械手腰座结构的设计 4
2.2.1 机械手腰座结构的设计要求 5
2.2.2 腰座结构设计具体采用方案 5
2.3 机械手手臂的结构设计 6
2.3.1 机械手手臂的设计要求 6
2.3.2 手臂结构设计具体采用方案 7
2.4 机械手腕部的结构设计 7
2.4.1 机器人手腕结构的设计要求 8
2.4.2 手腕结构设计具体采用方案 8
2.5 机械手末端执行器(手爪)的结构设计 9
2.5.1 机械手末端执行器的设计要求 9
2.5.2 机器人夹持器的运动和驱动方式 10
2.5.3 机器人夹持器的典型结构 10
2.5.4 设计具体采用方案 11
2.6 机械手的机械传动机构的设计 12
2.6.1 工业机器人传动机构设计应注意的问题 12
2.6.2 工业机器人常用的传动机构形式 12
2.6.3 设计具体采用方案 16
2.7 机械手驱动系统的设计 16
2.7.1 机器人各类驱动系统的特点 16
2.7.2 工业机器人驱动系统的选择原则 20
2.7.3 设计具体采用方案 21
2.8 机器人手臂的平衡机构设计 21
2.8.1 机器人平衡机构的形式 21
2.8.2 设计具体采用的方案 22
第3章 理论分析和设计计算 23
3.1 液压传动系统设计计算 23
3.1.1 确定液压系统基本方案 23
3.1.2 拟定液压执行元件运动控制回路 24
3.1.3 液压源系统的设计 24
3.1.4 绘制液压系统图 24
3.1.5 确定液压系统的主要参数 25
3.1.6 计算和选择液压元件 30
3.1.7 液压系统性能的验算 31
3.2 电机选型有关参数计算 32
3.2.1 有关参数的计算 32
3.2.2 电机型号的选择 34
第4章 机械手控制系统的设计 36
4.1 机械手控制系统硬件设计 36
4.1.1 机械手工艺过程与控制要求 36
4.1.2 机械手的作业流程 36
4.1.3 机械手操作面板布置 37
4.1.4 控制器的选型 37
4.1.5 控制系统原理分析 38
4.1.6 PLC外部接线设计 39
4.1.7 I/O地址分配 40
4.2机械手控制系统软件设计 40
4.2.1 机械手控制主程序流程图 40
4.2.2 机械手控制程序设计 41
结 论 43
致 谢 44
参考文献 45
参考文献
1 付永领, 王岩, 裴忠才. 基于CAN总线液压喷漆机器人控制系统设计与实现. 机床与液压. 2003: 90~92
2 丁又青, 朱新才. 一种新型型钢翻面机液压系统设计. 机床与液. 2003: 128~129
3 刘剑雄, 韩建华. 物流自动化搬运机械手机电系统研究. 机床与液压. 2003: 126~128
4 徐轶, 杨征瑞, 朱敏华, 温齐全. PLC在电液比例与伺服控制系统中的应用. 机床与液压. 2003: 143~144
5 胡学林. 可编程控制器(基础篇). 北京: 电子工业出版社, 2003.
6 胡学林. 可编程控制器(实训篇). 北京: 电子工业出版社, 2004.
7 孙兵, 赵斌, 施永康. 基于PLC的机械手混合驱动控制. 液压与气动. 2005: 37~39
8 孙兵, 赵斌, 施永康. 物料搬运机械手的研制. 机电一体化. 2005: 43~45
9 王田苗, 丑武胜. 机电控制基础理论及应用. 北京: 清华大学出版社, 2003.
10 李建勇. 机电一体化技术. 北京: 科学出版社, 2004.
11 王孙安, 杜海峰, 任华. 机械电子工程. 北京: 科学出版社,2003.
12 张启玲, 何玉安. PLC在气动控制称量包装装置中的应用. 液压与气动. 2005: 31~33
13赵文. 数字控制技术在龙门刨床电控系统中的应用. 电气传动. 2005: 55~57
14 沈兴全, 吴秀玲. 液压传动与控制. 北京: 国防工业出版社, 2005.
15 王宪军, 赵存友. 液压传动. 哈尔滨: 哈尔滨工程大学出版社, 2002.
16 徐灏等. 机械设计手册. 第5卷. 北京: 机械工业出版社, 2000.
17陈铁鸣, 王连明, 王黎钦. 机械设计(修订版). 哈尔滨: 哈尔滨工业大学出版社, 2003.
18 邓星钟. 机电传动控制(第三版). 武汉: 华中科技大学出版社, 2001.
19 西门子自动化与驱动集团(SIEMENS AG). S7-200系统手册. 2002.
20 蔡行健. 深入浅出西门子S7-200 PLC. 北京: 北京航空航天大学出版社, 2003.
22 张利平. 现代液压技术应用220例. 化学工业出版社, 2004.
23 高西林. 锻床上料机械手. 轻工机械. 2001.
24 李春波, 王大明, 李哲, 王祖温. PLC控制的气动上下料机械手. 液压气动与密封, 1999: 21~24
25 尹自荣, 熊晓红, 骆际焕, 王建坤. 数控上下料机械手的研究及应用. 锻压机械. 1994: 3~5
26 张波, 李卫民, 尚锐. 多功能上下料用机械手液压系统. 2002: 31~32
27 侯沂, 刘涛. 装卸机械手设计研究. 机械. 2004: 53~54
28 叶爱芹, 袁金强. PLC在机械手控制系统中的应用. 安徽技术师范学院学报. 2001: 64~65
29 王会香, 孙全颖. 自动涂胶机械手的PLC控制. 哈尔滨理工大学学报. 2002: 16~18
30 潘沛霖, 杨宏, 高波, 吴伟光. 四自由度折叠式机械手的结构设计与分析.哈尔滨工业大学学报. 1994: 90~95
31 刘新一. 多工位自动冲床机械手控制器设计. 广州大学学报(综合版). 2000: 19~20
32 吉爱国, 冯汝鹏, 郭伟, 张锦江. 计算机在机械手控制中的应用. 机械与电子. 1996: 8~9
33 GOLDBERG K.MASCHA M.GENTNER Desktop teleoperation via the World Wide Web 1995
34 SIMMONS R.FERNANDEZ J L.GOODWIN R Lessons learned from Xavier 2000
35 SAUCY P.MONDADA F Open access to a mobile robot on the Internet 2000
36 LUO R C.SU K L.SHEN S H Networked intelligent robots through the interact:issues and opportunities 2003




