




















机械手的设计 摘 要
本文简要介绍了工业机器人的概念,机械手的组成和分类,机械手的自由度和坐标形式,气动技术的特点,PLC控制的特点及国内外的发展状况。
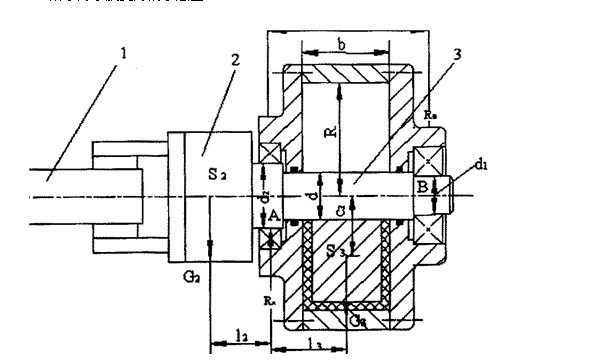
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机械手的手臂结构。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,对气压系统工作原理图的参数化绘制进行了研究,大大提高了绘图效率和图纸质量。
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序。
关键词:工业机器人,机械手,气动,可编程序控制器(PLC)
目 录
目录.........................................................1
文摘.........................................................1
第一章 绪论 1.1机械手概述.............................................2
1.2机械手的组成和分类.....................................3
1.2.1机械手的组成. 1.2.2机械手的分类
1.3国内外发展状况.. .........................................................................................41.4课题的提出及主要任务………………………………………………4
1.4.1课题的提出
1.4.2课题的主要任务
第二章 机械手的设计方案
2.1机械手的座标型式与自由度……………………………………….6
2.2机械手的结构方案设计……………………………………….6
2.3机械手的主要参数…………………………………………………..7
2.4机械手的技术参数列表……………………………………………7
第三章 手部结构设计
3.1夹持式手部结构…………………………………………………….8
3.1.2设计时考虑的几个问题
3.1.3手部夹紧气缸的设计
第四章 手腕结构设计
4.1手腕的自由度……………………………………………………….12
4.2手腕的驱动力矩的计算……………………………………………..12
4.2.1手腕转动时所需的驱动力矩
4.2.2回转气缸的驱动力矩计算
4.2.3回转气缸的驱动力矩计算校核
第五章 手臂伸缩,升降,回转气缸的设计与校核
5.1手臂伸缩部分尺寸设计与校核……………………………………..17
5.1.1尺寸设计
5.1.2尺寸校核
5 .1 .3导向装置
5 .1 .4平衡装置
5.2手臂升降部分尺寸设计与校核……………………………………18
5.2.1尺寸设计
5.2.2尺寸校核
5.3手臂回转部分尺寸设计与校核……………………………………18
5.3.1尺寸设计
5.3.2尺寸校核
第六章 气动系统设计
6.1气压传动系统工作原理图…………………………………………19
6.2气压传动系统工作原理图的参数化绘制…………………………21
第七章 机械手的PLC控制设计
7.1可编程序控制器的选择及工作过程……………………………….22
7.1.1可编程序控制器的选择
7.1.2可编程序控制器的工作过程
7.2可编程序控制器的使用步骤……………………………………….23
7.3机械手可编程序控制器控制方案…………………………………..24
第八章 结论…………………………………………………………………..28
致谢……………………………………………………………………………29
参考文献 参考文献:
[1】张建民.工业机器人.北京:北京理工大学出版社,1988
[2】蔡自兴.机器人学的发展趋势和发展战略.机器人技术,2001, 4
[3】金茂青,曲忠萍,张桂华.国外工业机器人发展势态分析.机器人技术与应用, 2001, 2
[4】王雄耀.近代气动机器人(气动机械手)的发展及应用.液压气动与密封,1999, 5
[5】严学高,孟正大.机器人原理.南京:东南大学出版社,1992
[6】机械设计师手册.北京:机械工业出版社,1986
[7】黄锡恺,郑文伟.机械原理.北京:人民教育出版社,1981
[8】成大先.机械设计图册.北京:化学工业出版社
[9】郑洪生.气压传动及控制.北京:机械工业出版社,1987
[10】吴振顺.气压传动与控制.哈尔滨:哈尔滨工业大学出版社,1995
[11】徐永生.气压传动.北京:机械工业出版社,1990, 5
微信

QQ1:3097331788 QQ2:2601997959 QQ3:2993773635



