





















夹持式机械手手部结构设计
夹持式手部结构由手指(或手爪)和传力机构所组成。其传力结构形式比较多,如滑槽杠杆式、斜楔杠杆式、齿轮齿条式、弹簧杠杆式等。
3.1.1手指的形状和分类
夹持式是最常见的一种,其中常用的有两指式、多指式和双手双指式:按手指夹持工件的部位又可分为内卡式(或内涨式)和外夹式两种:按模仿人手手指的动作,手指可分为一支点回转型,二支点回转型和移动型(或称直进型),其中以二支点回转型为基本型式。当二支点回转型手指的两个回转支点的距离缩小到无穷小时,就变成了一支点回转型手指;同理,当二支点回转型手指的手指长度变成无穷长时,就成为移动型。回转型手指开闭角较小,结构简单,制造容易,应用广泛。移动型应用较少,其结构比较复杂庞大,当移动型手指夹持直径变化的零件时不影响其轴心的位置,能适应不同直径的工件。
3.1.2设计时考虑的几个问题
(一)具有足够的握力(即夹紧力)
在确定手指的握力时,除考虑工件重量外,还应考虑在传送或操作过程中所产生的惯性力和振动,以保证工件不致产生松动或脱落。
(二)手指间应具有一定的开闭角
两手指张开与闭合的两个极限位置所夹的角度称为手指的开闭角。手指的开闭角应保证工件能顺利进入或脱开,若夹持不同直径的工件,应按最大直径的工件考虑。对于移动型手指只有开闭幅度的要求。
(三)保证工件准确定位
为使手指和被夹持工件保持准确的相对位置,必须根据被抓取工件的形状,选择相应的手指形状。例如圆柱形工件采用带“V”形面的手指,以便自动定心。
(四)具有足够的强度和刚度
手指除受到被夹持工件的反作用力外,还受到机械手在运动过程中所产生的惯性力和振动的影响,要求有足够的强度和刚度以防折断或弯曲变形,当应尽量使结构简单紧凑,自重轻,并使手部的中心在手腕的回转轴线上,以使手腕的扭转力矩最小为佳。
其工件重量G=5公斤,
V形手指的角度 , ,摩擦系数为
(1)根据手部结构的传动示意图,其驱动力为:
(2)根据手指夹持工件的方位 ,可得握力计算公式:
所以
(3)实际驱动力:
1、因为传力机构为齿轮齿条传动,故取 ,并取 。若被抓取工件的最大加速度取 时,则:
所以
所以夹持工件时所需夹紧气缸的驱动力为 。
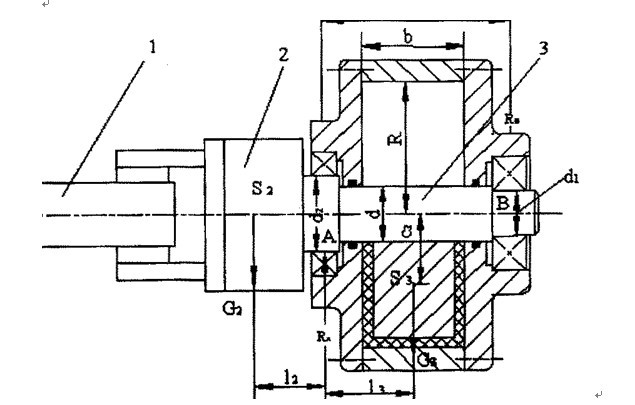
2、气缸的直径
本气缸属于单向作用气缸。根据力平衡原理,单向作用气缸活塞杆上的输出推力必须克服弹簧的反作用力和活塞杆工作时的总阻力,其公式为:
式中: - 活塞杆上的推力,N
- 弹簧反作用力,N
- 气缸工作时的总阻力,N
- 气缸工作压力,Pa
弹簧反作用按下式计算:
Gf =
式中: - 弹簧刚度,N/m
- 弹簧预压缩量,m
- 活塞行程,m
- 弹簧钢丝直径,m
- 弹簧平均直径,.
- 弹簧有效圈数.




