





















机械手以及PLC控制的设计 摘要
工业机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
关键词:机械手 plc 液压 梯形图 语句表
目录
调研报告…………………………………………………………………………3
摘要……………………………………………………………………………....4
第一章 引言……………………………………………………...……….........6
机械手设计组成及要求
动力臂的机械构造…………………………………………………………...9
控制和伺服系统……………………………………………………………....9
负反馈系统……………………………………………………………………10
总的操作方法…………………………………………………………………10
操纵臂的描述…………………………………………………………………11
动力控制系统的类别…………………………….......……………………….12
液压控制主电路板…………………………………………………………….13
总体设计方案及系统组成
3.1系统组成………………………………………………………………………..15
3.2总体设计方案…………………………………………………………………..15
3.3动作分析...............................................................................................................16
第四章 机械手plc控制系统设计
4.1控制系统选择……………………………………………………………………17
4.2 plc控制机械手的优点…………………………………………………………...17
4.3 plc的主要功能…………………………………………………………………...18
4.4机械手plc控制系统的基本组成………………………………………………..20
4.5机械手的动作过程………………………………………………………………24
4.6 plc选型及其I/O编号分配…………………………………………………......26
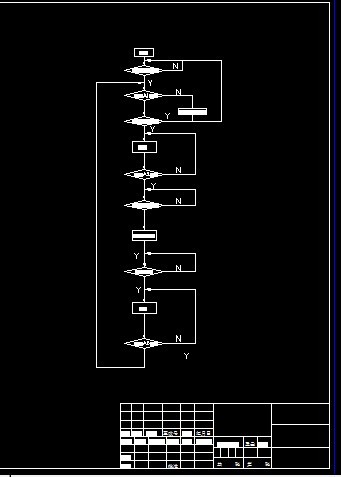
4.7程序的设计…………………………………………………………………........29
总结…………………………………………………………………………………. 32
参考文献…………………………………………………………………………….33
致谢………………………………………………………………………………….34
参考文献
[ 1 ] 许廖,王淑 英电气控制与plc应用 北京:机械工业出版社,2007
[ 2 ]刘敏 可编程控制器技术 北京:机械工业出版社,20001
[ 3 ]张筱琪 机电设备控制基础 北京:中国人民大学出版社, 20001
[ 4 ]赵仁良 电力拖动控制线路 北京:中国劳动出版社,19941
[ 5 ]宫淑贞,王冬青,徐世许 可编程控制器原理及应用 北京:人民邮电出版社, 2002
[ 6 ]陈贵芬 机械制图与计算机绘图 陕西:西安电子科技大学出版社,2006




