





















齿轮机构翻转机械手结构设计
摘 要
机械手并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,它主要是用以按固定程序抓取、搬运物件或操作工具的自动操作装置。所以气动机械手能够降低劳动强度,提高生产效率。但它的缺点也很明显,因为气体具有很大的可压缩性, 要做到气动机械手精确定位难度很大, 尤其是难以实现任意位置的多点定位;而且可压缩性也带来不能承受过重的负载的限制。传统气动系统只能靠机械定位置的调定位置而实现可靠定位, 并且其运动速度只能靠单向节流阀单一调定, 经常无法满足许多设备的自动控制要求。
本课题设计的机械手,一个运动进程实现一次抓取和翻转功能,降低工人的劳动强度,提高了工作效率,加快生产效率。
关键词:气动装置;机械手;翻转装置;
Abstract
Pneumatic manipulator is a robot which is based on Pressure-driven. The robot is the combination of expertise and expertise of an anthropomorphic machine electro-mechanical device, not simply instead of manual labor. It owns both the rapid response to the environment state and the ability of a long continuous operation, high accuracy, and the resistance to harsh environments. It is mainly used to crawl at a fixed program, and carry objects and operate tools automatically. So Pneumatic Manipulator can reduce labor intensity, improve production efficiency. However, its disadvantages are obvious. Pneumatic Manipulator getting the precise positioning is very difficult, especially achieving multi-point positioning to anywhere because of the great compressibility of gas. Also, the compressibility limits a load to be too heavy. Traditional pneumatic system only relies on the set position of the mechanical giving location and reliable positioning and velocity which relies on a single one-way throttle. So it is often unable to meet many requirements of the automatic control equipment.
After a deep study, we found that the pneumatic flip robot on the current production line can only be achieved crawling and flip function once in a movement process whose efficiency is too low. So we design a pneumatic flip robot which can achieve the two crawling and flipping in a motion process. There is no doubt that the pneumatic flip robot can improve work efficiency and speed up the production efficiency.
Key words: pneumatic devices; robot; turning device;;
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 选题的背景及意义 1
1.2齿轮翻转机械手的发展前景 1
1.2.1国外机械手状况 1
1.2.2国内机械手情况 3
1.3发展趋势 3
1.3.1重复高精度 3
1.3.2模块化 3
1.3.3无给油化 4
1.3.4 机电气一体化 4
1.4 机械手夹持部件结构示意图 4
1.4.1 外夹持型机械手 4
1.4.2 内夹持型机械手 5
第2章 翻转机械手总体设计 6
2.1 抓取系统的初步设计 6
2.2 翻转系统的初步设计 6
2.2.1 锥齿轮电机翻转 6
2.2.2 圆锥齿轮行星机构翻转 7
2.2.3 翻转方案选择 7
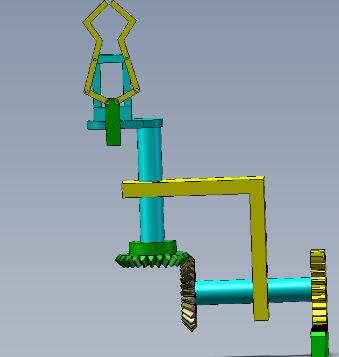
2.3气动翻转机械手的三维建模、装配思路 8
2.3.1各部分零件设计 8
2.3.2 气动翻转机械手的运动学仿真 8
2.3.3 研究思路方案、可行性分析及预期成果 9
第3章 气动翻转机械手重要零部件设计校核及其装配 10
3.1气缸的设计和校核 10
3.1.1 夹紧系统气缸设计和校核 10
3.1.2 翻转系统气缸设计和校核 13
3.2齿轮设计和校核 14
3.2.1齿轮参数的选择 14
3.2.2齿轮几何尺寸确定 14
3.2.3齿根弯曲疲劳强度计算 16
3.3齿条的设计和校核 18
3.3.1齿条的设计 18
3.4 固定机架上的轴设计和校核 20
3.4.1求输入轴上的功率、转速和转矩 20
3.4.2求作用在齿轮上的力 20
3.4.3 初步确定轴的最小直径 21
3.4.4轴的结构设计 22
3.4.5精确校核轴的疲劳强度 24
3.5圆锥滚子轴承的设计和校核 25
3.6键连接设计和校核 26
3.6.1输入轴键计算 26
3.6.2中间轴键计算 27
3.6.3输出轴键计算 27
3.7联轴器的设计和校核 28
第4章 三维建模和运动仿真 29
4.1 整体装配图 29
4.2夹紧系统装配图 30
第6章 总结 33
致 谢 34
参考文献 35
附录: 37
第1章 绪论
1.1 选题的背景及意义
近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。电气可编程控制技术与气动技术相结合, 使整个系统自动化程度更高, 控制方式更灵活, 性能更加可靠; 气动机械手、柔性自动生产线的迅速发展, 对气动技术提出了更多更高的要求;由于气动脉宽调制技术具有结构简单、抗污染能力强和成本低廉等特点, 国内外都在大力研发气动机械手。
1.2齿轮翻转机械手的发展前景
1.2.1国外机械手状况
从各国的行业统计资料来看, 近30多年来, 气动行业发展很快。20世纪70年代, 液压与气动元件的产值比约为9:1, 而30多年后的今天, 在工业技术发达的欧美、日本等国家, 该比例已达到6:4, 甚至接近5:5。
参考文献
[1]陶湘厅,袁锐波,罗璟.气动机械手的应用现状及发展前景[J]. 机床与液压, 2007, 35(8):226-228.
[2]杨振球,易孟林.高精度气动机械手的研发及其应用[J].液压与气动,2005:55-56.
[3]于传浩,章涤峰. 一种气动机械手夹持机构的设计[J].液压气动与密封,2003,101(5):22-28.
[4]鲍燕伟,吴玉兰.一种通用气动机械手的控制设计[J].机床与液压,2006, 9:166-169.
[5]吴淑英.机械手气动手爪的结构分析与选择[J]. 制造技术与机床, 1998, 9:9-11.
[6]郭瑞洁,钟康民.基于铰杆-杠杆串联增力机构的内夹持气动机械手[J]. 液压与气动, 2009, 1:55-56.
[7]姚二民,王新杰,马韬.一种气动式机械手的设计[J]. 机械设计与制造, 1996, 2:19-20.
[8]马亮,张庆峰,顾寄南. 一种新型数控气动机械手的设计与研究[J]. 机电工程,1998,28(2):162-171.
[9]林黄耀,杜彦亭,董霞.一种积木式气动机械手的研究设计[J].液压与气动,2005,10:12-13.
[10]韦尧兵,姜明星,刘军等.气动搬运机械手虚拟设计[J].液压与气动,2009,5:4-6.
[11]A.J.G. Nuttall, A.J. Klein Breteler. Compliance effects in a parallel jaw gripper[J].Mechanism and Machine Theory,2003,38:1509–1522.
[12]Ho Choi, Muammer Koc. Design and feasibility tests of a flexible gripper based on inflatable rubber pockets[J]. International Journal of Machine Tools &Manufacture,2006,46:1350–1361.
[13]马清艳,武文革,王彪,刘永姜等. 多工位搬运气动机械手教学的应用[J]. 电气电子教学学报,2012,34(2):74-76.
[14]聂彤.多机械手气动系统的设计方法[J].液压与气动,2001,3:13-15.
[15]黄崇莉,刘菊蓉.分拣机械手设计[J].液压与气动,2010,12:94-96.
[16]梁承文,陈元旭,王仪明.基于GT-Designer的气动包装机械手的设计与研究[J].机械工程与自动化控制,2010:300-303.
[17]谌渭.基于PLC的气动机械手手部结构设计优化方案[J].工程技术,2001,5:109.
[18]朱梅.基于机械手的全气动或电气动控制设计[J].液压与气动,2004,1:3-4.
[19]李增强, 章军, 刘光元.苹果被动抓取柔性机械手的结构与分析包装工程[J].2011,15(8):14-18.
[20]李庭贵. 气动机械手搬运物料精确定位控制系统设计[J].液压与气动,2012,1:54-56.
[21]张毅.气动机械手概述[J].大观周刊,2012,9:101-103.
[22]孙友刚,盛小明.气动送料机械手变尺寸自动对中夹持器的设计[J].液压与气动,2011,6:54-55.
[23]吴庆达.新型气动机械手[J]. 中国学术期刊,1994,1:71.
[24]吴静如. 一种气动机械手及运动设计[J].高科技产品研发,1998,2:69-70.
http://www.bysj1.com/html/2557.html http://www.bysj1.com/ http://www.bysj1.com/html/2258.html http://www.caddown.bysj1.com/



