





















基于三菱FX2N的四自由度气动机械手设计
摘要
随着社会生产不断进步和人们生活节奏不断加快,人们对生产效率也不断提出新要求。由于微电子技术和计算机软、硬件技术的迅猛发展和现代控制理论的不断完善,使机械手技术快速发展。
用于再现人手的的功能的技术装置称为机械手。机械手是一种模仿人手动作,并按设定程序、轨迹和要求代替人手抓(吸)取、搬运工件或工具或进行操作的自动化装置。在工业生产中得到广泛应用。
机械手的结构组成和主要技术参数。主要组成:1.真空吸盘 2. 真空吸盘气缸 3. 双轴气缸(升降缸)与真空吸盘气缸的过渡板 4. 双轴气缸(升降缸和伸缩缸) 5.双轴气缸(伸缩缸)与旋转气缸的过渡板 6. 旋转气缸 7. 旋转气缸与立柱的过渡板 8. 立柱 9. 角铁 10. 底座。机械手技术参数列表: 1. 自由度数 2. 座标型式 3. 最大工作半径 4. 手臂最大中心高 5. 手臂运动参数:(1)伸缩行程(2)伸缩速度(3)升降行程(4)升降速度(5)回转范围。
进行了机械手气动系统和电气系统设计。气动系统设计:分析气压传动的组成及工作原理、气压传动的优缺点、气动机械手的气缸的选用。电气系统设计:PLC内部原理、PLC的工作原理、PLC机型的选择方法、机械手PLC选择及参数。
关键词:机械手;气缸;电气系统;PLC
第1章 绪论
1.1 基于PLC的气动机械手设计的意义
随着社会生产不断进步和人们生活节奏不断加快,人们对生产效率也不断提出新要求。由于微电子技术和计算机软、硬件技术的迅猛发展和现代控制理论的不断完善,使机械手技术快速发展。
用于再现人手的的功能的技术装置称为机械手。机械手是一种模仿人手动作,并按设定程序、轨迹和要求代替人手抓(吸)取、搬运工件或工具或进行操作的自动化装置。在工业生产中得到广泛应用。
其中气动机械手采用PLC控制气路及气压回路驱动气缸实现要求的运动轨迹,在结构上,与其他类型的机械手相比,气动机械手具有结构简单,控制容易,其气动部件已系列化和组立化,便于设计与实现,且维护方便。由于气动机械手这些特点,气动机械手在生产过程自动化中的应用已日益广泛。气动机械手系统由于其介质来源简便以及不污染环境、组件价格低廉、维修方便和系统安全可靠等特点,已渗透到工业领域的各个部门,在工业发展中占有重要地位。
气动技术经历了一个漫长的发展过程,随着气动伺服技术走出实验室,气动技术及气动机械手迎来了崭新的春天。目前在世界上形成了以日本、美国和欧盟气动技术、气动机械手三足鼎立的局面。我国对气动技术和气动机械手的研究与应用都比较晚,但随着投入力度和研发力度的加大,我国自主研制的许多气动机械手已经在汽车等行业为国家的发展进步发挥着重要作用。随着微电子技术的迅速发展和机械加工工艺水平的提高及现代控制理论的应用,为研究高性能的气动机械手奠定了坚实的物质技术基础。
由于气动机械手有结构简单、易实现调速、易实现过载保护、易实现复杂的动作、气源使用方便、不污染环境、动作灵活可靠、工作安全可靠,适用于需要模拟人的重复动作场合以及恶劣的工作环境中等诸多独特的优点,因而在冲压加工、注塑、机床下料、仪表电子、汽车航空及自动化生产线中有着广阔的应用前景。
本文设计了一种基于三菱PLC控制的四自由度的气动机械手,用于电子生产线上的自动抓取与搬运光盘,该气动机械手有气控真空机械手、旋转气缸、基座等机械部分组成。运用PLC可编程技术进行控制,对气动机械手完成生产物料运输搬运工作实现自动化控制。该气动机械手能放置在各种不同的电子产业的生产线或物流流水线中,使电子光盘的搬运更快捷、便利、准确、到位。
1.2 机械手的国内外的发展概况
1.2.1 机械手的发展史
mechanical hand,也被称为自动手,auto hand,能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手首先是从美国开始研制的。1958年美国联合控制公司研制出第一台机械手。它的结构是:机体上安装一个回转长臂,顶部装有电磁块的工件抓放机构,控制系统是示教形的。
1962年,美国联合控制公司在上述方案的基础上又试制成一台数控示教再现型机械手。商名为Unimate(即万能自动)。运动系统仿照坦克炮塔,臂可以回转、俯仰、伸缩、用液压驱动;控制系统用磁鼓作为存储装置。不少球坐标通用机械手就是在这个基础上发展起来的。同年该公司和普鲁曼公司合并成立万能自动公司,专门生产工业机械手。
1962年美国机械制造公司也实验成功一种叫Vewrsatran机械手。该机械手的中央立柱可以回转、升降采用液压驱动控制系统也是示教再现型。虽然这两种机械手出现在六十年代初,但都是国外工业机械手发展的基础。
1978年美国Unimate公司和斯坦福大学,麻省理工学院联合研制一种Unimate-Vicarm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差小于±1毫米。联邦德国机械制造业是从1970年开始应用机械手,主要用于起重运输、焊接和设备的上下料等作业。
联邦德国KnKa公司还生产一种点焊机械手,采用关节式结构和程序控制。
日本是工业机械手发展最快、应用最多的国家。自1969年从美国引进两种机械手后大力从事机械手的研究。
前苏联自六十年代开始发展应用机械手,至1977年底,其中一半是国产,一半是进口[1]。
目前,工业机械手大部分还属于第一代,主要依靠工人进行控制;改进的方向主要是降低成本和提高精度。
第二代机械手正在加紧研制。它设有微型电子计算控制系统,具有视觉、触觉能力,甚至听、想的能力。研究安装各种传感器,把感觉到的信息反馈,是机械手具有感觉机能。
第三代机械手则能独立完成工作中过程中的任务。它与电子计算机和电视设备保持联系,并逐步发展成为柔性制造系统FMS和柔性制造单元FMC中的重要一环。
1.2.2 气动机械手的发展史和发展前景
随着工业机械化和自动化的发展以及气动技术自身的一些优点,气动机械手已经广泛应用在生产自动化的各个行业。
近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求;微电子技术的引入,促进了电气比例伺服技术的发展,现代控制理论的发展,使气动技术从开关控制进入闭环比例伺服控制,控制精度不断提高;由于气动脉宽调制技术具有结构简单、抗污染能力强和成本低廉等特点,国内外都在大力开发研究。
由于气压传动系统使用安全、可靠,可以在高温、震动、易燃、易爆、多尘埃、强磁、辐射等恶劣环境下工作”’。而气动机械手作为机械手的一种,它具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境、容易实现无级调速、易实现过载保护、易实现复杂的动作等优点。所以,气动机械手被广泛应用于汽车制造业、半导体及家电行业、化肥和化工,食品和药品的包装、精密仪器和军事工业等 。
现代汽车制造工厂的生产线,尤其是主要工艺的焊接生产线,大多采用了气动机械手。车身在每个工序的移动;车身外壳被真空吸盘吸起和放下,在指定工位的夹紧和定位;点焊机焊头的快速接近、减速软着陆后的变压控制点焊,都采用了各种特殊功能的气动机械手。
此外,气动系统、气动机械手被广泛应用于制药与医疗器械上。如:气动自动调节病床,Robodoc机器人,da Vinci外科手术机器人等。
1.3 本课题应达到的要求
本课题的任务是研制自动化生产线中用于搬运光盘的气动机械手。该机械手要实现光盘的抓取、释放、搬运等动作,要求结构合理,动作准确迅速。本课题采用日本三菱公司的FX2N系列PLC,对机械手的上下、左右、回转以及光盘吸取运动进行自动化控制。我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作,来配合和实现生产上的要求。
由于时间仓促和个人水平限制,我的设计存在着许多还没来得及解决的问题,希望广大老师、同学能够给予批评指正并予以解决。
目 录
摘要 Ⅱ
Abastract...............................................................................................................................Ⅲ
第1章 绪论 1
1.1 基于PLC的气动机械手设计的意义 1
1.2 机械手的国内外的发展概况 2
1.2.1 机械手的发展史 2
1.2.2 气动机械手的发展史和发展前景 3
1.3 本课题应达到的要求 4
第2章 机械手基本结构与控制任务 4
2.1 机械手的主要部件及运动 4
2.2 机械手的结构及技术参数列表 5
2.2.1 气动机械手的结构 5
2.2.2 气动机械手的技术参数列表 5
第3章 机械手气动系统设计 5
3.1气压传动的组成及工作原理 6
3.1.1 气源装置及辅件 6
3.1.2 气动控制元件 8
3.1.3 气动执行元件 8
3.2 气动机械手的气缸的选用 9
第4章 机械手电气系统设计 10
4.1 PLC简介 10
4.1.1 PLC内部原理 10
4.1.2 PLC的工作原理 13
4.1.3 PLC机型的选择方法 15
4.1.4 机械手PLC选择及参数 16
4.2 FX2N系列PLC......................................................................................................17
4.2.1 FX2N的特点…………………………………………………………………...17
4.2.2 FX2N产品说明……………………………………………………………… ..18
4.2.3 FX2N家族成员………………………………………………………………...18
4.2.4 FX2N性能规格………………………………………………………………...19
4.3FX2N基本指令的运用...........................................................................................23
4.3.1 电气气动控制( PLC控制) 24
4.3.2 PLC的选择 25
第5章 机械手典型动作的PLC程序设计 27
参考文献 31
附录 32
致 谢 33
参考文献
[1]金茂青,曲忠萍,张桂华. 国外工业机器人发展势态分析[J ] ,机器人技术与应用[1].2001 :6-8
[2]胡晓明主编. 电气控制及PLC[M]. 机械工业出版社,2006 :165-170
[3]陈应定,吴玉香等主编. 电气控制与可编程控制器[M]. 华南理工大学出版社, 2001,第一版 5-356
[4]廖常初主编. 可编程序控制器应用技术[M]. 重庆大学出版社, 2002 :89-123
[5]邱士安主编. 机电一体化技术[M]. 西安电子科技大学出版社,2005 :65-70
[6]纪铭刚,濮良贵等主编. 机械设计[M]. 高等教育出版社, 2006 第八版 :3-19
[7]冯辛安主编. 机械制造装备设计[M]. 机械工业出版社, 2005 :160-178
[8]田鸣主编. 机械技术基础[M]. 机械工业出版社, 2005 :203-245
[9]岳庆来主编. 变频器、可编程序控制器及触摸屏综合运用技术[M]. 机械工业出版社, 2006 :20-25
[10]SMC(中国) 有限公司. 现代实用气动技术[M] . 北京:机械工业出版社, 1997 :6-77
[11]陈淑梅主编. 液压与气压传动[M]. 机械工业出版社, 2008 第一版 :297-344
[12]李中年主编. 控制电气及应用[M]. 清华大学出版社, 2006 第一版 :280-300
[13]孙恒,陈树英等主编. 机械原理[M]. 高等教育出版社, 20006 第一版 :263-297
[14]程周主编. PLC技术与应用[M]. 福建科学技术出版社, 2004 :60-80
[15]Bernhard Klaassen , Ralf Linnemann. Biomimetic walking robot SCORPION : Control and modeling[J ] . Robotics and autonomous systems , 2002 ,41(2 - 3) :69 - 76.
[16]Schempf H ,Mutschler E. A robot pipe2asbestos insulation re2moval system [ J ] . Industrial Robot , 1998 ,25(3) :196 -204
[17] Durstewitz,M ;Kiefner,B ,Virtual collaboration environment for aircraft design,Information Visualisation,2002. Proceedings.Sixth International Conference on,10-12 July 2002 :502- 507
附录
1.气动机械手结构图 QDJXS-01 一张 A0
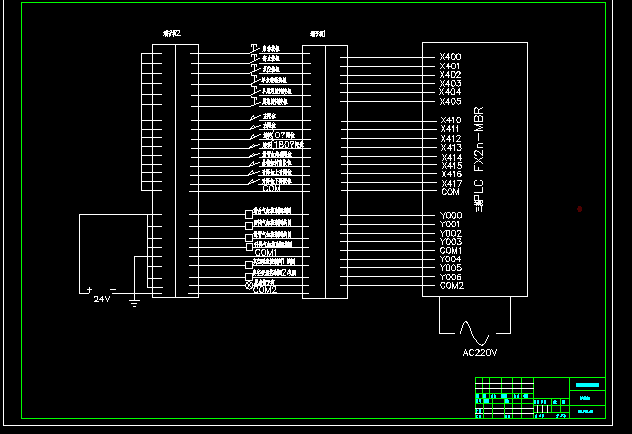
2.电气接线图 QDJXS-02 一张 A4
3.PLC梯形图 QDJXS-03 二张 A3
4.气动原理图 QDJXS-04 一张 A4
5.任务图 QDJXS-05 一张 A3
6梯形图截图 三菱FX2N 五张 A3
代做电子专业毕业设计请登录:http://www.bysj1.com/html/4334.html




