





















基于触摸屏的轮式移动机器人控制系统设计
摘 要
轮式移动机器人是机器人家族中的一个重要的分支,也是进一步扩展机器人应用领域的重要研究发展方向。自上世纪九十年代以来,人们广泛开展了对机器人移动功能的研制和开发,为适应各种工作环境的不同要求而开发出各种移动机构。其中全方位轮可以实现高精确定位、原地调整姿态和二维平面上任意连续轨迹的运动,具有一般的轮式移动机构无法取代的独特特性,对于研究移动机器人的自由行走具有重要愈义。
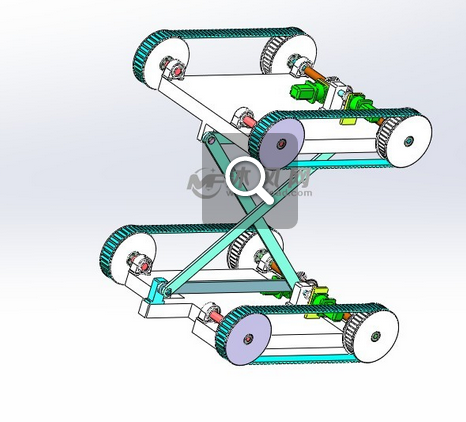
本文主要是介绍了技术较为成熟的麦克纳姆全方位轮的运动原理结构,分析了由四个麦克纳姆轮全方位轮组成的全向移动机构的运动协调原理。 并将其运用到轮腿复合式的机器人身上,使机器人移动能力更强。设计的主要方面包括(1)
移动方式的选择;(2)机器人移动原理的分析;(3)对移动机器人触屏控制系统的简单设计。
关键词: 轮式移动机器人,触屏,系统设计
Abstract
Wheeled mobile robot is an important branch of the robot family, and it is also an important research direction in the future. Since the 90s of last century, the research and development of mobile robot has been widely carried out, in order to adapt to the different requirements of different working environment and developed a variety of mobile mechanisms. The omni-directional wheel can achieve high accurate positioning, in-situ adjust posture and 2D arbitrary continuous path movement, the unique characteristics of wheeled mobile mechanism has generally can not be replaced, has important meanings for the research of mobile robot walk freely.
This article mainly introduced the structure principle of the movement of the omni-directional Mecanum mature technology, analyses the motion coordination principle of omnidirectional mobile mechanism by four Mecanum wheel omni-directional wheel consisting of. And apply it to the wheel leg composite robot body to make the robot move more powerful. The main aspects of the design include (1)
The choice of the moving mode; (2) the analysis of the principle of the mobile robot; (3) the simple design of the touch screen control system of the mobile robot.
Key words: wheeled mobile robot, touch screen, system design
目录
摘 要 1
绪 论 5
1.1 引言 6
1.2 轮式移动机器人的发展概况 7
1.3 PLC概况及在轮式移动式机器人中的应用 11
第2章 轮式移动机器人的控制系统及触摸屏设计 13
2.1 移动机器人控制系统设计 13
2.1.1 原理 13
2.1.2 元器件的选择 14
2.1.3 移动机器人平台总体结构 14
2.1.4 移动机器人硬件系统 15
2.2 机器人触屏的操作功能 16
第3章 轮式移动机器人系统的设计 18
3.1输入和输出点分配表 18
表3.1输入点分配表 18
3.2 原理接线图 20
第4章 触摸屏的制作 21
4.1制作过程 21
第5章 系统的调试 28
5.1 设计注意事项 28
5.2 使用要点 28
5.3 程序调试 30
5.3.1 程序的模拟调试 30
5.3.2 轮式移动机器人的运动过程及其分析 30
总 结 33
致 谢 34
附 录(程序) 35
参考文献
[1] 王永华编著. 现代电气控制及PLC应用技术. 北京:北京航空航天大学出版社,2008
[2] 刘锴 周海编著. 深入浅出西门子S7-300PLC. 北京:北京航空航天大学出版社,2004
[3] 钱文伟编著. 工程制图(非机类). 北京:高等教育出版社,2007
[4] 黄坚编著. 自动控制原理及其应用. 北京:高等教育出版社,2005
[5] 常文平编著. 工厂供电技术. 北京:中国电力出版社,2009
[6] 许晓峰编著. 电机及拖动. 北京:高等教育出版社,2007
[7] 田效伍. 电气控制与PLC应用技术. 北京: 机械工业出版社,2006
[8] 戚新波. 检测技术与智能仪器. 北京: 电子工业出版社,2005
[9] 邵惠鹤. 工业过程高级控制. 上海:上海交通大学出版社,1997
[10] 郝海清. 串联关节式轮式移动机器人的控制系统分析与设计. 万方数据库硕博士论文,2002
[11] 蔡萍等. 现代检测技术与系统. 北京:高等教育出版社,2002
[12] 王家桢. 传感器与变送器. 北京:清华大学出版社,1996
[13] 侯国章. 测试与传感技术. 哈尔滨:哈尔滨工业大学出版社,1998
[14] 康华光. 电子技术基础. 北京:高等教育出版社,2006
[15] 杨栓科. 模拟电子技术. 北京:高等教育出版社,2003
[16] 胡宴如. 电子技术基础. 北京:中国电力出版社,1999
[17] 郭培源. 电子电路及电子器件. 北京:高等教育出版社,2000
[18] 刘介才. 工厂供电. 北京: 机械工业出版社,2004
http://www.bysj1.com/ http://www.bysj1.com/html/5215.html http://www.bysj1.com



