




















移动机器人独立牵引控制机构的设计
移动机器人正在被广泛的应用于建筑物的检查和安全,军事侦察,和行星探险等领域。 在应用的过程中,机器人被期待遇到粗糙的地带。在粗糙的地带,移动机器人能够维持足够的牵引,这一点是非常重要的,因为过度的轮滑可能导致机器人失去可动性,甚至被困。本文提出了一种牵引控制算法,可以独立实施于每个车轮,相比标准速度控制方法,无需要额外的传感器和其它设备。该算法估计的粘滑的车轮是以角加速的判断为基础的。因此,牵引力诱导扭矩车轮相反的链之间的最大静摩擦和动力学摩擦。通过仿真和实验,该算法已经得到了验证。与标准速度控制方法相比,牵引控制算法减少总数滑移距离的40.5%,功率消费减少了25.6%。此外,该算法不需要复杂的轮-土交互作用模型或机器人运动学的优化。
1. 引言和背景
移动机器人已经被应用在了各种领域, 包括建筑物检查和安全,军事的侦察,和行星探险等。美国航天局喷气推进实验室(JPL) 的漂泊者就是为行星探索任务而研制的机器人的一例成功的例子(Golombek 1998; Schenker et al. 2003; Hayati et al. 1997)。穿越粗糙地带的其他例子也被发现应用在采矿业和危险材料的处理以及建筑物检查等方面。(Siegwart et al. 2002; Dalvand和Moghadam 2006 Leet al. 2003; Cho et al. 2005; Maurette 2003)。这些移动机器人的共同的需求是长期的操作性和高度可动性,在粗糙的地域履行艰难的任务。粗糙的地形对移动机器人维持足够的车轮牵引是很重要的。过度的轮滑可能增加车轮和地面之间的联系点的数量,或更严重的是,机器人可能会失去所有可动性直至被困。
牵引控制系统已被应用到平坦的表面,以改善可动性和车辆的能源效率(Lee and Tomizuka1996; Tan and Chin 1992)。该系统在汽车工业方面已被发展。 然而, 并没有适当的粗糙地形来维持移动机器人所需的车轮滚动速度,因此每个车轮的速度是不同的。移动的机器人的不同的运动学应该考虑应用牵引控制技术来克服粗糙的地形。在这方面,较近期的工作已经在发展以运动学和动力学为基础的牵引控制系统的移动机器人(Yoshida和Hamano 2002)。然而,为了开发这种全新的机器人,在线计算的运动学和动力学将是无可避免的(Sarkar和Yun 1998)。虽然测量经由一个倾角罗盘或电位计是相当简单和廉宜的,但运动学和动力学的连续的计算可能会给主控制器在多任务同时进行时造成负担。
将粘滑减少的另一种方法是以物理学为基础的牵引力控制系统,是基于地形资料来优化个别轮子的转矩。该方法的要素主要包含轮-地形接触角的估算(Iagnemma和Dubowsky 2004; Iagnemma et al. 2004; Lamon et al. 2004)。另外的估计方法是控制活跃关节以提高漂泊者的安定(Iagnemma et al. 2003)。简单的估计可获得移动的机器人是随着地域轮廓慢慢地改变的。此外,不精确的轮-地面夹角估计将导致发动机的转矩轮的不适应,从而将产生导致产生轮滑的错误的联系角。因此,一项比较最近的研究已经把重心集中在轮子和地面之间的联系角度的直接测量(Lamon和Siegwart 2005)。
本文提出的牵引控制算法可以独立实施于每个车轮,而且,所提出的算法不需要运动学和动力学的实时计算相比其他的牵引控制算法。运算法则估计粘滑是以角加速的观察为基础,通过增加或减少扭矩来完成的。所提出的算法不需要运动学和动力学的实时计算相比其他的牵引控制算法。运动学和动力学的计算只是控制器设计的初级阶段。因而,消除对运动学和动力学的计算将非常有助于减少机器人在粗糙地形移动或者执行任务时的控制负担。尤其是机器人在结合执行其他另一项任务的时候。
综合的建模包括对动态机器人的控制表现,以检验牵引控制算法和相关的假定。该算法是为了研制爬楼梯的机器人而提出来的。与传统的速度控制系统相比,牵引控制算法不 但增加了机器人的灵活性而且还减少了对功率的消耗。扭矩比较的结果表明综合的建模是可靠的。楼梯攀爬的实验结果表明所提出的控制算法跌幅的基本工作在车轮。
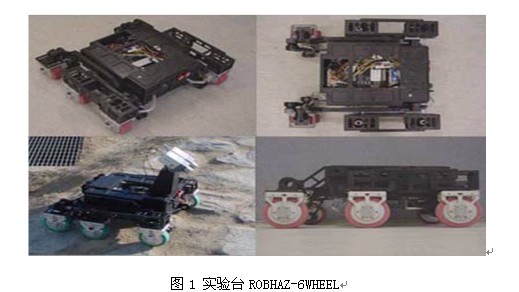
2实验台: ROHBAZ-6WHEEL
实验台发展于韩国科学技术院,名字叫ROBHAZ-6WHEEL (危险环境的机器人),是基于机器人对不规则的地域使用时的被动性和适应性而设计的。图1所示为ROBHAZ-6WHEEL。联系参数可以优化机器人,以克服目标楼梯。它的6个轮子通过4连杆机构相连接,能够更加广泛的适应性于粗糙的地域。ROBHAZ-6WHEEL有8个自由度:机器人本体有6个自由度和左右两侧的被动联接机械装置有2个自由度(Yoon et al. 2004)。

微信

QQ1:3097331788 QQ2:2601997959 QQ3:2993773635



