





















自动捡网球机器人的机械爪PLC控制系统设计(plc论文大全)
摘要:本课题主要讲的是在机器人机械爪的基础上来研究设计的自动捡网球机器人的机械爪的控制。
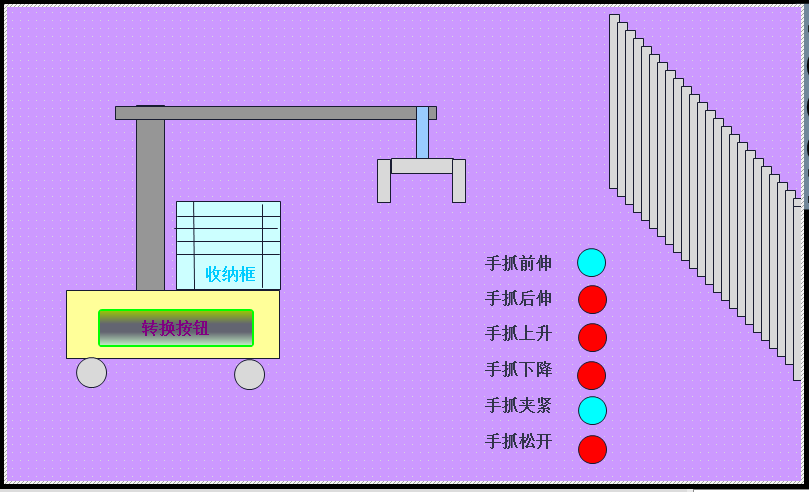
自动捡网球机器人的机械爪的运作动作:
首先是,机械爪先伸出,既是机械爪进行右行;到达网球所在的位置。然后机械爪下降,抓取网球,抓取网球这一动作完成后,机械爪再上升,缩回到原来的位置,缩回既是机械爪左行。再下降到放置网球的框内,最后松开机械爪,网球落进框内。
至此,机械爪便完成了整个抓取网球的动作过程。
当抓取的网球达到了指定的个数时,机械人行走至指定位置,然后,机械爪 下降,抓取网球,上升,机械爪伸出,机械爪松开,重复此动作,直到把网球全部抓取完。本课题就是设计研究的自动捡网球机器人的机械爪的控制。
关键词:机器人;机械爪;智能;捡球; PLC
Mechanical paw control the robot to pick up tennis
Abstract: this topic mainly talking about in the robot mechanical claw on the basis of the research design of the robot to pick up tennis to control mechanical claw.
The robot to pick up tennis of the operation of mechanical claw action:
First of all is that mechanical claw out first, both mechanical claw for the right; Arrive at tennis. Then mechanical claw down, grabs the tennis, fetching tennis after completion of the action, mechanical paw to rise again, back to its original position, the back is not only the mechanical paw on the left. Down to put the tennis box again, finally loosen the mechanical paw, tennis fall into the box.
At this point, the mechanical paw is complete the whole process of fetching the tennis movement.
When fetching tennis has reached the specified number, robots walk to the specified location, and then, mechanical claw down, grab the tennis, rise, mechanical paw outstretched, mechanical paw to loosen, repeat this action, until finish all tennis grab. This topic is to design the research of the robot to pick up tennis to control mechanical claw.
Key words: robot; Mechanical claw; Intelligent; Pick up the ball; PLC
目 录
第一章 绪论 3
1.1 课题来源及研究意义 3
1.2 国内外机器人技术发展与现状 4
1.3机器人概述 5
1.3.1行走方式 6
1.3.2捡球方式 7
1.4机械爪概述 7
1.4.1机械爪分类 8
1.4.2机械爪组成 10
1.5机械爪的材料选择 11
1.6 本论文的主要研究内容 12
1.7本章小结 12
第二章 自动捡网球机器人的机械爪控制的硬件设计 13
2.1控制系统硬件设计 13
2.1.1机械爪气缸的选型 13
2.1.2机械爪臂的选型设计 13
2.1.3机械爪爪的选型设计 15
2.2 PLC选型 15
2.3触摸屏选型 16
第三章 自动捡网球机器人的机械爪控制的软件设计 19
3.1 PLC编程 19
3.1.1 I/O分配图与主电路图 20
3.1.2接线图与流程图 20
3.1.3 PLC程序 24
3.2触摸屏显示 31
第四章 结论 34
致谢 35
参考文献 36
附录
参考文献
1.吴志敏、阳胜峰 西门子PLC与触摸屏、触摸屏综合应用教程 北京:中国电力出版社 2009。
2.刘华波 西门子S7-200 PLC编程应用案例精选拔 北京:机械工业出版社2009。
3.史宜巧 PLC技术与应用 北京:机械工业出版社 2009。
4.向晓汉 西门子PLC高级应用实例精解 北京:机械工业出版社 2010。
5.廖常初 PLC编程与应用 北京:机械工业出版社 2005。
6.周美兰 PLC电气控制与组态设计 北京:科学出版社 2003。
7.向晓汉 电气控制与PLC技术基础 北京 清华大学出版社 2007
8.罗宇航 流行PLC实用程序及设计 西安 西安电子科技大学出版社 2006
9.王浩 机电电气控制与PLC北京机械工业出版社2012



