





















捡网球机器人的设计
摘 要
该机器人主要应用在网球比赛场和训练场上,它有自动捡网球和自动送网球的功能。虽然,现在市面上有很多智能的机器人已经应用到我们的日常生活当中,但是并没有专门应用在网球场上的机器人。在网球场上,在比赛或者训练的时候,地面上肯定会有很多出界和无效的网球。现在,我们一般主要还是通过人工的方法来捡球和送球,这明显降低了工作的效率和提高了工作人员的劳动强度。因此,如果我们将智能机器人应用在网球场上,实现捡球和送球的自动化,这将会大大提高我们的工作效率和降低了工作人员的劳动强度。所以将自动捡球机器人应用在网球场上,这将会有很大的市场发展潜力。
在本设计论文中,主要是自动捡球机器人机械结构部分的设计。用SOLIDWORKS仿真 软件构建出自动捡球机器人的立体模型,并对各部分的运动机构进行分析说明。最后,用AutoCAD软件绘制出相应零部件的工程图和机器人的装配图。本文详细讨论了机器人机械结构的设计。首先,为了更好地理解机械结构的设计思路,在开始的时候,就引入了总体的设计方案。然后,对各个主要的机构进行详细的设计和分析。最后,介绍了设计的总体效果。
关键词:机器人,机械结构,SOLIDWORKS仿真
绪论
1.1 背景
机器人是一个自动执行某种动作的机械装置,它既可以接受人类指挥,又可以运行预先编制的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物。现在,机器人在各行各业中,都有着广泛的应用,例如制造业、建筑业,或是其它危险性的工作[1]。
要想设计出一个机器人,就必须要具备以下这些方面的能力。第一,电子学基础。这部分内容包括模拟电路和数字电路理论,要学习电阻、电容器、晶体管以及其他普通电子元器件等基础知识。第二,编程基础。先进的机器人都使用计算机或微处理器(例如单片机)来控制自己运动的,这就需要靠编程来实现。第三,机械基础。机器人也是一台机器,要靠运动来完成任务。要想设计一个机器人这就需要设计一些相应运动的机械机构。
随着计算机技术和人工智能技术的高速发展,机器人在功能和技术上都取得了很大的提高。现在,即使在严峻的经济形势下,仍有很多面向各个新应用领域的机器人不断涌现出来。目前,机器人应用率的快速增长并非仅仅是一时的狂热,而是社会发展的必然趋势。许多枯燥、肮脏和危险的工作最终将由机器人代替人工来完成。随着机器人技术的高速发展,机器人竞技运动在世界各地蓬勃兴起。社会在不断地发展,对机器人的要求也越来越高[2]。
目前,我国也正掀起一股机器人的热潮。我国机器人的技术也取得了很大的进步。我国的机器人技术大致有如下发展趋势:(1)智能化。智能化不仅是对机器人系统的要求,也是对工作环境的要求。智能化的发展趋势,有效地提高机器人工作的效率和使用性能。(2)标准化和模块化。我国还没有统一的机器人标准。统一的标准和平台能够大大减少应用软件厂商的成本,并能优化服务机器人领域的体系结构,规范中间件,实现模块化[3]。
1.2 本课题研究的内容
该机器人的主要任务是自动捡网球,主要应用在网球比赛场或者练习场上。设计的自动捡球机器人大概的工作流程如下:当自动捡球机器人通过声控装置自动识别并接收到运动员发出的捡网球命令后,采用图像识别技术自动识别网球落下的方位。然后,对网球的位置分布作一个最优的行程判断,再走到每个球落下的地方。最后,将网球捡起来,放进存放腔中。当机器人接收到由运动员发出送球指令后,再自动地把网球送给运动员,完成自动捡网球的一个工作流程。
本论文,主要涉及到的是机械结构部分的设计,采用SOLIDWORKS仿真 软件构建出机器人的模型,并且对各个设计出的运动机构进行分析说明。
目 录
1 绪论 1
1.1 背景 1
1.2 本课题研究的内容 1
1.3 论文的构成 2
2 总体设计方案 3
2.1 行走方式 3
2.2 捡球方式 3
2.3 驱动和转向的方式 4
2.4 主体材料的选择 6
3 结构的设计 7
3.1 驱动机构 7
3.1.1 电源的选择 7
3.1.2 电机的选择 8
3.1.3 车轮的确定 8
3.1.4 驱动装置 9
3.2 捡球机构 11
3.2.1 捡球的总装置 11
3.2.2 微型真空泵的选择 13
3.2.3 堵气机构 14
3.2.4 存放腔的设计 20
4 机器人的传感器 22
4.1 机器人的视觉 22
4.2 机器人的触觉 22
4.3 机器人的计数功能 23
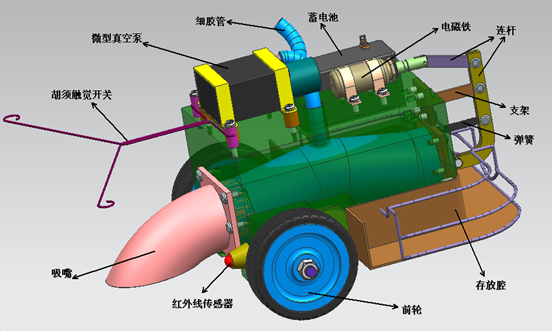
5 设计的总效果与工作过程 24
5.1 设计的总效果 24
5.2 工作过程 25
结论 26
致谢 28
参考文献 29
参考文献
[1]熊有伦.机器人技术基础[M]. 武汉:华中科技大学出版社,1997.
[2](美)Gordon McComb,(美)Myke Predko著.庞明,王晓宇译.机器人设计与实现[M].北京:科学出版社,2008.
[3]王楷.移动服务机器人室内运动规划研究[D].重庆:重庆大学,2009.
[4]成都新为诚科技.微型真空泵相关[EB/OL].http://www.wcjx..bysj1.com/faq.htm.
[5]沈阳蓄电池研究所.蓄电池网[EB/OL].www.batteryinf.bysj1.com.
[6]李乃夫.电机与控制[M].北京:高等教育出版社,2002.
[7]红旗山电子.万向轮产品[EB/OL].http://www.zghqs.bysj1.com/cpcx/cpcx.asp.
[8]朱孝录.齿轮传动设计手册[M].北京:化学工业出版社,2005.
[9]成都新为诚科技.抽气、打气两用型微型真空泵-中流量、中真空、高正压FAA系列[EB/OL].http://www.wcjx..bysj1.com/FAA.htm.
[10]武进继电器厂.微型电磁铁[EB/OL].http://www.cn002.bysj1.com/index.html.
[11]孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2005.
[12]濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2005.
[13]成大先.机械设计手册[M].北京:化学工业出版社,2005.
[14]Ribo M,Pinz A.A comparison of three uncertainty calculi for building sonar
based occupancy grids[J].Robotics and autonomous systems,2001,35:201-209.
[15]Barbara Zitova Jan Flusser.Landmark recognition using invariant features[J].
Pattern Recognition Letters,1999,20(5):541-547.
[16]Reid D.An algorithm for tracking multiple targets.IEEE Transactions Oil Automatic Contr01,1979,24(6):843-854.
[17]胡选子,贺定修,谢存禧.一种移动机器人的路径规划方法[P].中国专利:CN201010230039.4,2010.
http://www.bysj1.com/ http://www.bysj1.com/html/4406.html http://www.bysj1.com/html/4404.html http://www.bysj1.com/html/4382.html http://www.bysj1.com/ http://www.bysj1.com/html/4432.html http://www.bysj1.com/html/4429.html http://www.bysj1.com/html/4427.html



