





















应用于管道的机器人设计(说明书+cad图纸)机械毕业设计
Robot graduation design for pipeline
摘要(Abstract):
The operation mechanism of pipeline robot is mainly composed of a speed reducer, a driving wheel, a driven wheel, a transmission shaft and some connect parts.The overall design of the operating mechanism is: the calculation of the reduction ratio, the calculation of the gear strength, the choice of the motor, the calculation of the shaft strength, the design of the four bar mechanism.
管道机器人操作机构主要由减速器、主动轮、从动轮、传动轴和一些连接件,经营机制的总体设计ISM是:减速比的计算、齿轮的强度计算、电动机的选择、轴的强度计算,四杆机构的设计。
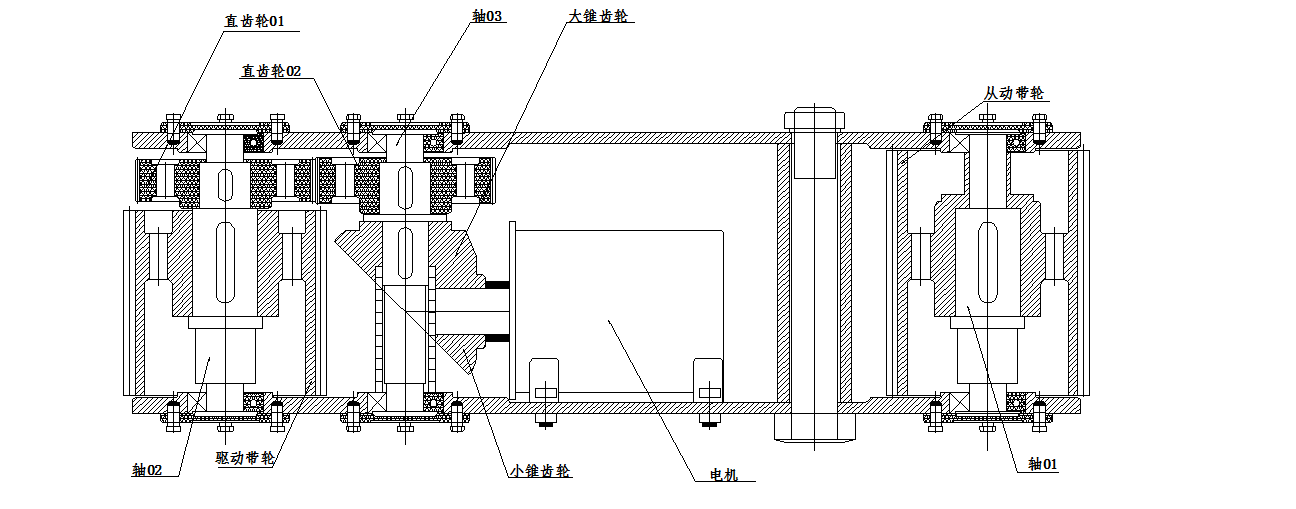
This design uses the power source for SG-27ZYJ DC motor, the output shaft of the motor and reducer high speed shaft through a shaft coupling connection, through the reducer output is relatively slow speed while the robot in the pipeline in forward or backward is the output shaft through a driving wheel drives a crawler.
本设计使用SG-27ZYJ直流电机的电源,通过联轴器连接电机和减速机高速轴的输出轴通过减速器输出相对缓慢的速度在管道机器人前进或后退的输出轴通过传动轮带动履带。
Pipeline application range is very wide, such as that used in daily life and industrial and agricultural production. Plug the pipeline and pipeline failure and damage, mostly in the using process of the pipeline, thus requires regular maintenance, maintenance etc.. But pipeline environment is often can't get people achieve or don't allow people to directly enter, so is especially important now is development of in pipe robot.
管道应用范围十分广泛,如日常生活和工业生产和农业生产。堵塞管道和管道的破坏和损坏,主要是在使用过程中的他管道,因此需要定期维护、保养等。但是管道环境往往不能让人们达到或不允许人们直接进入,所以现在尤为重要管道机器人的发展。
On the pipeline robot for structural design is design major. Hence the 3D parametric feature modeling software Pro / Engineer to establish the 3D model of the pipeline robot, generate the drawings of main parts and components of the robot. Dynamic simulation on the main body of the pipeline robot, validate the mechanism design is correct. Finally the design and check calculated main parts, and briefly describes the robot control scheme.
管道机器人的结构设计主要是设计。因此,三维参数化特征建模软件专业/工程师建立的管道机器人的三维模型,生成的图纸机器人的主要部件和部件。对管道机器人主体的动态仿真,验证了机构设计的正确性。最后的设计和校核计算的主要部分,和BRI简要介绍了机器人控制方案。
Key words: pipeline robot; structure design; pipeline adaptive; ultrasonic testing; 3D modeling; gear rotating mechanism; track; shaft.
关键词:管道机器人;结构设计;管道自适应;超声波检测;三维建模;齿轮转动机构;履带;轴。
目录
第1章 绪论 1
1.1课题研究的背景 1
1.2论文的主要内容 1
第2章 管道机器人的指标要求 2
2.1 技术指标 2
2.2 工作指标 3
第3章 管道机器人的元器件选用 4
3.1 选用电动机 4
3.2 选用配件 4
第4章 管道机器人的机架部分的设计与计算 5
4.1 机架部分的功能与结构 5
4.2 分析机架部分的力学特性 5
第5章 管道机器人的机架部分传动系统的设计与计算 8
5.1 I级传动系齿轮的设计与计算 8
5.1.1 寿命要求和初步数据 8
5.1.2 材料选用 8
5.1.3 关于接触疲劳强度的设计与计算 8
5.1.4 修正参数 10
5.2 Ⅱ级传动系齿轮的设计与计算 12
5.2.1 寿命要求与初步数据 12
5.2.2 材料选用 13
5.2.3 关于接触疲劳强度的设计与计算 13
5.2.4 修正参数 15
5.3 传动螺杆的设计与计算 17
5.3.1 寿命要求和初步数据 17
5.3.2 耐磨性条件计算 17
5.3.3 计算螺杆的强度 18
第6章 履带的行走系设计 19
6.1 对于行走系的选择 19
6.2 履带的行走系 19
6.3 设计并计算同步带和带轮(履带) 20
6.3.1 功率的计算 20
6.3.2 选择普通V带型号 20
6.3.3 计算大小带轮基准直径 20
6.3.4 计算验算带速v 20
6.3.5 计算V带基准长度和中心距 20
6.3.6 带宽 21
6.3.7 剪切应力验算 21
6.3.8 压强验算p 21
6.3.9 求出作用在带轮轴上的切向力F 21
6.3.10 选择同步带轮型号和参数 21
第7章管道机器人的行走系中的传动系统 23
7.1 Ⅰ级圆锥齿轮传动系齿轮的设计与计算 23
7.1.1 寿命要求和初步数据 23
7.1.2 材料选用 23
7.1.3 关于接触疲劳强度的设计与计算 23
7.1.4 修正参数 25
7.1.5 检查并计算弯曲强度 25
7.2 Ⅱ级传动系齿轮的设计与计算 28
7.2.1 寿命要求和初步数据 28
7.2.2 材料选用 28
7.2.3 关于接触疲劳强度的设计与计算 28
7.2.4 修正参数 30
7.2.5 检查并计算弯曲强度 30
7.3 Ⅲ级圆柱齿轮传动系的设计与计算 32
7.3.1 寿命要求和初步数据 32
7.3.2 材料选用 32
7.3.3 关于接触疲劳强度的设计与计算 32
7.3.4 修正参数 34
7.3.5 检查并计算弯曲强度 35
第8章 行走系中轴系零件的设计 37
8.1 履带轴系中驱动轮轴的零件设计与计算 37
8.1.1 驱动轮轴的计算 37
8.1.2 高速轴的校验 38
8.2 履带轴系零件锥齿轮传动轴设计与计算 39
8.2.1 锥齿轮轴设计与计算 39
8.2.2 锥齿轮轴校验 40
8.2.3 计算锥齿轮轴承的寿命 43
8.3设计并计算从动轮的传动轴 44
8.3.1驱动轴轮的计算 44
8.3.2 高速轴的校验 45
第9章 履带架部分零件的设计与计算 47
9.1 履带架部分相关的弹簧设计 47
9.2 履带架部分的螺栓设计 48
9.2.1 螺栓的选择GB/T5780-2000 M3×27 性能等级8.8 48
9.2.2 螺栓与孔壁联接的长度满足 48
9.3 四杆机构的设计(履带架部分) 48
第10章 结 论 49
致 谢 50
管道机器人调研报告 51
参考文献 52
参考文献
[1]倪森寿 机械技术基础[M]人民邮电出版社 ,2009
[2]成大先,机械设计手册单行本(轴承)[M].北京:化学工业出版社,2005
[3]陈平,张双侠,尹利平,AutoCAD2010[M].北京:机械工业出版社,2011
[4]刘建武,机电专业英语[M].西安:西安交通大学出版社 2014
[5]钱晓忠,王海荣,自动堆垛式载运机器人技术手册.
[6]减速器实用技术手册编委会[M].减速器实用技术手册. 北京:机械工业出版社,1992
[7]章日进,机械零件的结构设计[M]. 北京:机械工业出版社,1987
[8]裴先茹,高海荣.压电材料的研究和应用现状[J]. 安徽化工,2010
http://www.bysj1.com/cat.asp?id=22&page=8
http://www.bysj1.com/cat.asp?id=25&page=7



