






六足仿生机器人三维造型及ADAMS运动仿真设计
摘要
机器人技术是个高速崛起的新型行业,机器人的出现,主要是为了提高工作效率,减轻人工负担, 机器人运动的灵活性及适应性在设计开发过程中非常重要。本课题中研究的多足机器人就是一种典型的仿生学机械结构优化设计,通过模仿昆虫的步行行走模式和过程,针对传统机器人自身所带的机械结构方面的约束,来模仿设计出具有较强环境适应能力的仿生甲虫机器人,结构较为灵活轻巧,然后通过合理的选用结构材料,结构稳定性好,适合于在特种环境中作业,适用范围也比较广。
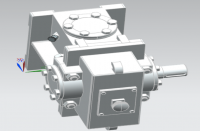
基于六足甲虫的原型并适当简化,进行了仿生甲虫机器人的结构设计,机器人机身采取以轴线对称的八边形设计,其腿部结构是一个三自由度的结构,由三个转动关节组成,即跟关节、髋关节及膝关节,而基节、股节和胫节则绕着三个关节做着单自由度的旋转运动,利用SolidWorks三维建模软件去建立仿生甲虫机器人的整体机械结构。
完成机械结构方面的设计之后再对甲虫的运动模式进行模拟,将生物的运动方式赋给机器人,模仿自然界的已有范例,最后,采取了三角步态,具体阐述了仿生甲虫机器人直线运动时,或是定点转弯运动时的不同运动步态,得出了仿生甲虫机器人六条腿的末端位置矢量表达式。
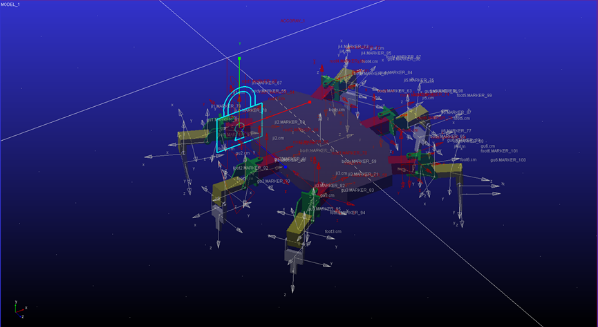
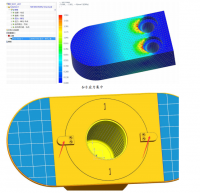
在步态仿真阶段,采用ADAMS来进行运动仿真,先导入模型,再定义完运动副和接触力后,进行调试,得出了仿生甲虫机器人的运动步态仿真和各类仿真曲线,通过ADAMS对仿生甲虫机器人的仿真,证明仿生甲虫机器人的结构设计合理性及可行性,行走方式也较为稳定,符合设计的要求。
1 绪论
1.1 课题背景
在目前的时代背景下,机器人技术,在技术不断地变革中,作为一个目前正在高速崛起的新型行业,正在经历着飞速的发展。机器人技术由于其多样性,因此可以运用在许多的行业及企业中,其适应性及发展前景可见一斑。在我们的日常生活中,机器人也是慢慢地走入我们的视野,只是我们感觉不明显。其实,我们的已经从最为传统的手工生产转型成为机械生产,其变化之大让人咋舌。同时,机器人技术的程度也是能反应一个国家的经济实力以及军事能力的,也是对外宣扬国家能力的一种重要手段。
机器人技术的发展主要是从上个世纪中叶开始兴起的[1]。伴随着计算机的发展越来越好,同时工业农业自动化技术的普及,也是大大推动了机器人行业的前进步伐,同时也拓展了其涉足的领域。相辅相成,机器人在工业农业中的低位越来越高,人们越来越依赖机器人技术,同时也不断在进行着改进,优化机器人在专业领域的运用程度。
机器人的出现,主要是为了提高效率,减轻人工负担[2]。其发展的目标也始终在这方面进行着很大的努力。在这样的背景下,仿生学,又一种较为新颖的学科诞生了。仿生学,顾名思义,仿照生物的运动能力来进行研究以此优化机器人的机械结构[3]。它不仅涉及生物学,还会牵涉到机械结构设计,传感器技术,物理学等诸多不同的学科。本次研究的多足机器人就是一种典型的仿生学机械结构优化设计。通过模仿昆虫的步行行走模式和过程,机器人轮式和履带式的传统运动结构得以改变,可以像昆虫一样大大拓展机器人的运动范围和适用情景。由此看来,多足仿生机器人的设计对于我们人类生产或是自然探究来说都是具有深远的意义。
在目前的社会环境下,多足机器人已经慢慢步入了我们的视野当中,对多足机器人的关注度也越来越高。相较于其他运动方式的运动机器人,六足机器人由于可以模仿六足昆虫的活动方式,因此也可以想昆虫一样灵活机动地在不同的地形上自由运动。也正是其优越的运动特性,人们也乐于发掘这样的运动机器人的潜力,对其也越发重视。
机器人的机械可靠性验证,如果是靠直接按照设计先加工出实物再进行实验的话,会大大提高开发成本,同时也会延长开发周期,调整不便,修改困难。因此使用计算机仿真技术是一种可行的研究方案。通过生产实物前的计算机模拟来对设计的物品进行评估,再决定如何修改,简单方便。为了实现简单结构下的功能多样化及运动稳定性,本次设计的仿生甲虫机器人拟采用对称结构设计思路,采用低密度高刚度的材料,使得机器人稳定且重量轻,运动灵活,大大提升了机器人的灵活性[4]。
1.2 课题研究的目的及意义
科技技术在不断进步,从而推动着机器人技术也在大步向前发展和快速迭代。机器人运动的灵活性及适应性总是人们在设计开发过程中比较在乎的话题,正如我们所知道的在自然界和人类社会中存在一些人类无法到达的地方和可能危及人类生命的特殊场合,地形不规则和崎岖不平是这些环境的共同特点,这种不规则的不稳定地形在我们地球占据了绝大部分。这种地形是传统轮式运动或是履带传动的机器人无法顺利到达的,而参考多足昆虫,可以灵活地在其中自由活动。因此多足机器人的设计思路也随之诞生,凭借着卓越的环境适应能力,以及极大程度的降低对环境的物理性影响等等,弥补了传统轮式运动或是履带传动的机器人的不足之处。
根据生物进化的原理,多足爬行生物在地形变幻复杂的环境下会有强健的骨骼支架,灵活的肌肉构成躯体,同时通过很长时间进化的体型也是符合相应的生活环境。骨骼和肌肉的合理布局,使得它们能在这样的地形中迅速移动但却可以灵巧地躲避障碍物。这点对于人类社会来说是十分难能可贵的。比如在灾区抢险时,地形复杂,人类无法顺利到达救灾地点。这时需要这样的机器人来代替人们进入难以进入的地方。因此在本次设计中,我们根据大自然中常见的甲虫进行仿生模拟,设计出相应的仿生甲虫机器人,之后进行运动学仿真,来看看设计的机器人机械结构方面是否满足设计要求[5]。
本次设计的机器人的目的在于,针对传统机器人的自身机械结构方面的约束[6],不能很好的去适应工作环境的变换以及一些工作任务的变换,所以,通过大自然中已有的“生物经验”,来模仿设计出具有较强环境适应能力的甲虫机器人。完成机械结构方面的设计之后再对甲虫的运动模式进行模拟,将生物的运动方式赋给机器人,模仿自然界的已有范例,比如甲虫直线运动时,或是定点转弯运动时的步态分析,通过算法与硬件相结合的方式来验证设计是否合理稳定。
本课题的意义在于:
(1)采用仿生结构,环境适应度高;
(2)仿甲虫设计,结构灵活,轻便高效;
(3)合理的选用结构材料,结构稳定性好,适合于在特种环境中作业,适用范围比较广;
(4)研究对于抗争救灾或设备维修方面具有十分的实际意义,研究价值较高。
1.3 仿生甲虫机器人的国内外研究现状
多足机器人是一种模仿多足动物肢体结构的一种运动机器人,有着冗余驱动、比较多的支链结构、时变拓扑的的运动结构[7]。多足,一般指的是四足及以上的足数结构。目前发展下,四足机器人是比较常见的多足机器人,在这其中,又以四足步行机器人较多[8]。在更多足数的情况下也是类似,步行的运动结构比较多见。在二十世纪八十年代,多足机器人先驱者,美国著名机器人研究者R.B.McGhee,开始着手研究四足步行机器人[9]。从当时至今,多足机器人的步态理论研究始终还是个难点,多足机器人的机械部分开发可能远远领先于步态理论研究,如今还有许多专家学者专门从事相关的研究。
我国其实在很早以前就有类似的多足仿生机器人的研究,仿生对象为牛和马。没错,就是在三国时期出现的神秘的“木牛流马”。而在国外,有记载的最早设计的多足放声机器人是1893年Rygg研究制造的马型机器人[10]。经过了几百年的研究,人类在这方面的研究也取得了巨大的进步。总结归纳,人类对于这类机器人共经过了一下几个阶段:
(1)第一阶段:
第一阶段的机器人基本是通过机械原理以及液压原件来实现机器人的运动。在二十世纪六十年代,美国科学家就通过凸轮连杆机构设计出了多足步行机器人,其灵活性比当时的轮式或是履带式传动的机器人更为灵活机动。如图1.1所示,四足步行机器人时候液压马达系统来作为动力,通过驾驶员身上的传感器来检测姿态。整个机器人非常巨大,且操作困难。但是其意义巨大,通过四组系统实现了步行以及攀爬等功能,是人类多足机器人史上的一坐里程碑。虽然实现了一定的功能,但是其主要操控者还是通过人来实现,因此在步态算法方面其实贡献有限,主要突破在于机械结构方面。
目录
1 绪论 3
1.1 课题背景 3
1.2 课题研究的目的及意义 4
1.3 仿生甲虫机器人的国内外研究现状 5
1.4 本课题的主要内容 10
1.5 本课题的研究方法 11
1.6 本章小结 12
2 仿生甲虫机器人的结构设计 12
2.1 六足甲虫生物原型结构特点 12
2.2 仿生甲虫机器人模型的建立 14
2.3 仿生甲虫机器人机构的结构分析 18
2.4 本章小结 19
3 仿生甲虫机器人的步态规划 19
3.1 步态规划 19
3.2 机器人坐标定义 20
3.3 仿生甲虫机器人直行步态 21
3.4 仿生甲虫机器人定点转弯步态 24
3.5 本章小结 26
4 仿生甲虫机器人运动学分析 27
4.1 仿真软件的介绍 27
4.2 仿真甲虫机器人模型建立 28
4.3 仿真甲虫机器人直行仿真 37
4.4 仿真甲虫机器人定点转弯仿真 42
4.5 本章小结 48
5 结论与展望 49
5.1 作者的工作 49
5.2 展望 50
参考文献 52
参考文献
[1] 邓广福,王效,刘鹏. 机器人技术的国内外发展现状探究[J]. 装备制造技术,2015(4):237-238.
[2] 李航,宋春华,罗胜彬,韦兴平,刘小利. 机器人的研究现状及其发展趋势[J]. 微特电机, 2012(8):49-51.
[3] 张秀丽,郑浩峻,陈恳,段广洪. 机器人仿生学研究综述[J]. 机器人,2002(2):188-192.
[4] 黄旭民. 一种腿轮四足机器人机构及其步态与仿真的研究[D] . 哈尔滨工业大学,2008.
[5] 姜树海,孙培,唐晶晶,陈波. 仿生甲虫六足机器人结构设计与步态分析[J]. 南京林业大学学报, 2012(6):115-120.
[6] 岳瑛. 柔性机器人协调操作系统动力特性及其优化设计[D] . 北京工业大学, 2004.
[7] 黄俊军,葛世荣,曹为. 多足步行机器人研究状况及展望[J]. 机床与液压,2008(5):187-191.
[8] 于浩. 液压四足机器人的结构设计与分析[D]. 南京航空航天大学,2012.
[9] 陈刚. 六足步行机器人位姿控制及步态规划研究[D]. 浙江大学,2014.
[10] 黄涛. 四足步行机器人的步态规划与实现[D]. 郑州轻工业学院,2007.
[11] 王新杰. 多足步行机器人运动及力规划研究[D]. 华中科技大学, 2005.
[12] 杨慧慧. 基于R、C副和全P副的空间连杆步行机构研究[D]. 北京交通大学,2010.
[13] 马东兴. 四足机器人步态规划与仿真[D]. 南京航空航天大学,2008.
[14] 徐小云,颜国正,丁国清,刘华,付轩,吴岩. 六足移动式微型仿生机器人的研究[J]. 机器人, 2002(5):427-431.
[15] 戴佳. 仿生六足机器人运动规划的设计与实现[D]. 东南大学,2010.
[16] 罗庆生,韩宝玲. 现代仿生机器人设计[M]. 北京: 电子工业出版社,2008.
[17] 陈波,唐晶晶,姜树海. 基于ADAMS的仿生六足机器人运动仿真[J]. 计算机仿真,2012(9):182-186.
[18] 管荣强,高吴多. 六足救援机器人结构设计与步态分析[J]. 网友世界·云教育,2014(2):50.
[19] 姜树海,潘晨晨,袁丽英,宋倩. 六足减灾救援仿生机器人机构设计与仿真[J] . 计算机仿真,2015(11):373-377.
[20] 孙培. 六足仿生机器人控制系统研究[D]. 南京林业大学,2010.
[21] 陈波. 仿生甲虫可重构机器人机构建模与仿真[D]. 南京林业大学 ,2012.
[22] 徐帅. 六脚仿生机器人运动步态控制研究[D]. 宁夏:宁夏大学电子与通信工程学院,2013.
[23] 柳天虹. 仿生甲虫可重构机器人控制系统研究[D]. 南京林业大学 ,2013.
[24] 尹晓琳. 六足仿生机器人步态规划及其控制策略研究[D]. 哈尔滨工业大学,2013.
[25] 苏军. 多足步行机器人步态规划及控制的研究[D]. 华中科技大学, 2004.
[26] 刘庆运,景甜甜. 六足步行机器人及其步态规划研究进展[J]. 重庆理工大学学报,2015(7):87-94.
[27] 于欣龙. 六足仿蜘蛛机器人样机研制及步行机理研究[D]. 哈尔滨工程大学,2013.
[28] 胡斌. 四足机器人结构化地貌典型步态研究[D]. 哈尔滨工业大学,2011.
[29] 宣奇波. 多足步行机器人步态规划及控制系统的研究[D]. 杭州电子科技大学,2013.
[30] 柳天虹,姜树海. 仿生六足机器人稳定性分析与仿真[J]. 计算机仿真,2013(12):360-364.
[31] CT Chen,TT Liao. Robotics and Computer-Integrated Manufacturing,2011.
[32] 刘泽华. 基于甲虫材料微结构的仿生结构设计与研究[D]. 江苏大学,2014.
[33] 章小红. 基于三维软件Solidworks的机械专业课课程设计[J]. 考试周刊,2015(63):166.
[34] 王晓. 基于仿生学的四足机器人本体结构研究[D]. 山东科技大学,2014.
[35] 刘海清. 六足仿生机器人结构优化设计及其位姿控制策略研究[D]. 哈尔滨工业大学,2012.
[36] 周立炜. 四足机器人的虚拟样机仿真研究[D]. 武汉科技大学,2013.




