






基于UG海洋垃圾收集器的设计与仿真
摘要
摘要:在如今的 21 世纪,随着全世界科技与经济的飞速发展,人们的生活质量变得越来越好,可环
境的污染却也日益严重,虽然各国已经逐渐认识到对环境的保护的重要性,也已经在有意识的保护环境,
但只要人类还在发展,对环境的污染也就会始终存在。所以现在对环境的保护就势在必行,而在这众多的
环境污染之中,水污染和海洋污染就是重中之重,因为水是生命之源,这关系到了人类的生存,因此对水
污染的治理是当今的世界必须要解决的问题。
虽然水面垃圾收集器如今在市面上已经有了不少,但都不太理想,大部分的水面漂浮垃圾都还是要靠
传统的人工捞取,效率低下且成本也高,所以未来市场上海洋垃圾收集器有很好的设计和发展前景。
本课题设计了一种适合平静水面的漂浮垃圾收集器当然也适合平静的海面,近些年,随着中国经济的
高速发展环境污染日趋严重,特别是江河湖泊的污染更是严重,但是由于人们环保意识的淡薄,我国国内
河道和沿海地区的污染非常严重,水面上常常会漂浮许多的垃圾,极大的影响了当地的生态环境,而现在
主要还是采用人工打捞收集垃圾,但是通过传统人工打捞的方式费时且费力,效率低下不说且成本还高。
而本产品就是为了解决这些问题而设计的专门为平静的水面设计的垃圾收集装置,主要研究的内容有总体
方案的设计、零部件的结构与设计、太阳能板的设计,除此之外,还有海洋垃圾收集器的安全使用和保养
问题也需要介绍。
关键词:水面垃圾:海洋垃圾收集器:设计:海洋垃圾收集器的使用:保养
第一章 绪论
1.1 研究背景
第四届世界水论坛提供的联合国水资源世界评估报告显示,全世界每
天有几百万吨的垃圾倒进河流、湖泊和小溪,而每升废水会污染 8 升淡水,
这使得全世界能饮用的水资源变得日益减少,所有流经亚洲城市的河流都
被污染;美国百分之四十左右的水资源被各种垃圾污染:欧洲 55 条河流
中只有 5 条水质勉强能用,水污染让全世界本就不多的水资源更加减少。
虽然现在全世界都已经渐渐意识到了对水上垃圾治理的重要性,但国
外对水上垃圾的治理都主要体现在水面油污的处理和海域等广阔水域的
水上垃圾打捞,而国内对水上垃圾的打捞多为打捞船,国内在这方面的相
关专利有许多。有专利号为 CN92106962.6 的水面垃圾收集船,还有是专
利 号 为 00216721 的 挡 臂 式 水 上 垃 圾 手 机 清 理 机 。 以 及 专 利 号 为
CN211711022U 的水面垃圾回收装置等等。这些专利与我要研究的相比,
工作方式有着很大的区别。
上述的水面垃圾收集装置,总体都是以人工驾驶的形式来打捞垃圾,
这些与的装置相比,就显得大而笨重,能工作的地方就只有比较大的河面,
而我的装置能覆盖更多的地方,特别是池塘等地方,更贴近现实。
1.2 发展趋势
水面垃圾收集器是现在及以后必须发展的工具,毕竟海洋占世界面
积的 71%,而海洋垃圾和内陆水面漂浮垃圾的治理问题每年也困扰着全
世界每一个国家,如何更好的,更高效的治理水面漂浮垃圾问题,这是迫
切需要解决的问题。所以从理论上来说,水面垃圾收集器在中国以及世界
上的市场都非常可观。
1.3 课题研究内容
本课题主要研究的是一个海洋垃圾收集器,包含以下内容。
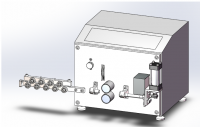
(1) 确定海洋垃圾收集器的总体设计,主要包括抽水泵的选择,水泵止回阀的选择,水泵定时装置,太阳能充电板的设计,外形
设计,出水口,入水口,垃圾桶/过滤网,平衡装置,远程电
控装置,垃圾收集过滤袋。
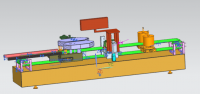
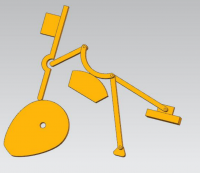
(2) 利用 NX 建立海洋垃圾收集器大的模型,然后装配上,生成爆
炸图;
(3) 远程遥控方面的设计
目录
第一章 绪论_______________________________________________________________________5
1.1 研究背景_________________________________________________________________ 5
1.2 发展趋势_________________________________________________________________ 5
1.3 课题研究内容_____________________________________________________________ 5
1.4 本章小结_________________________________________________________________ 6
第二章 总体方案的设计_____________________________________________________________7
2.1 海洋垃圾收集器的基本功能__________________________________________________ 7
2.2 海洋垃圾收集器的结构设计_________________________________________________ 7
2.3 本章小结_________________________________________________________________ 7
第三章 功能机构设计与选择_________________________________________________________8
3.1 抽水泵的选择______________________________________________________________ 8
3.1.1 抽水泵的选择____________________________________________________________ 8
3.1.2 技术参数________________________________________________________________ 8
3.2 使用 NX 软件对太阳能充电浮板进行建模_______________________________________ 9
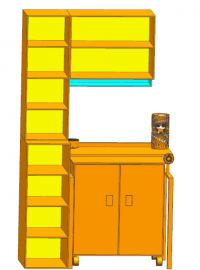
3.3 使用 NX 软件对垃圾桶进行建模______________________________________________ 12
3.4 使用 NX 对箱盖进行建模____________________________________________________ 14
3.5 使用 NX 对箱体进行建模____________________________________________________ 15
3.6 水泵止回阀的选择_________________________________________________________ 20
3.6.1 正确选型_______________________________________________________________ 20
3.6.2 升降式止回阀的工作原理_________________________________________________ 20
3.6.3 零件材料表_____________________________________________________________ 21
3.6.4 安装维护_______________________________________________________________ 21
3.7 本章小结_________________________________________________________________ 21
第四章 设计整体的装配和爆炸______________________________________________________22
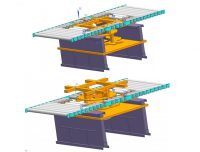
4.1 海洋垃圾收集器的装配_____________________________________________________ 22
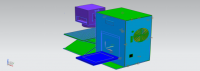
4.2 海洋垃圾收集器的爆炸_____________________________________________________ 29
4.3 本章小结_________________________________________________________________ 30
第五章 控制方式__________________________________________________________________31
5.1 遥控船遥控_______________________________________________________________ 31
5.2 本章小结________________________________________________________________ 32
第六章 防碰撞系统的设计_________________________________________________________33
6.1 防碰撞系统_______________________________________________________________ 33
6.2 本章小结_________________________________________________________________ 33
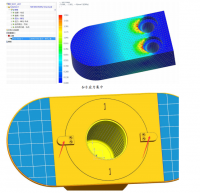
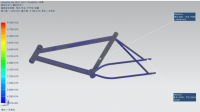
第六章 有限元分析________________________________________________________________34
6.1 有限元分析的介绍_________________________________________________________ 34
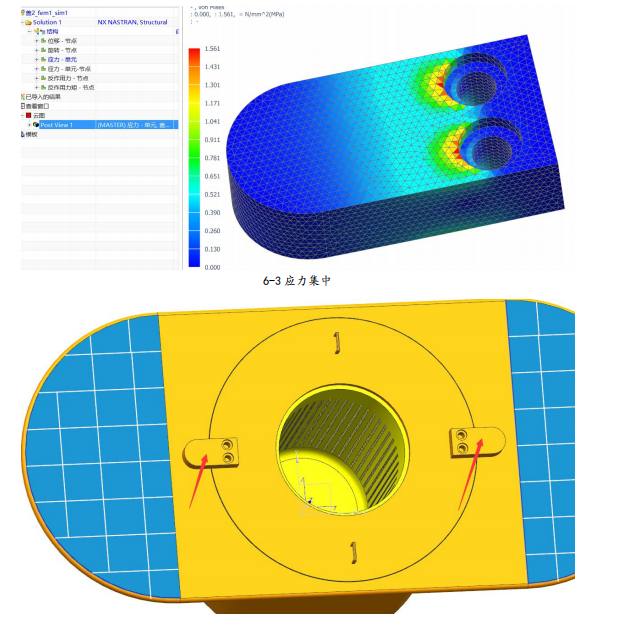
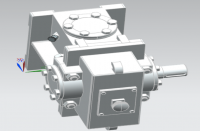
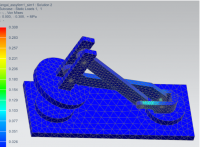
6.2 对于箱盖夹紧部件的有限元分析_____________________________________________ 34
6.3 本章小结_________________________________________________________________ 36
第七章 总结与展望________________________________________________________________37
致谢_____________________________________________________________________________38



