






基于UG多连杆机构的 CAE 分析
摘要:本文研究的课题是多连杆机构的建模、运动仿真及其有限元分析。以多连杆机构作为研究对象,对
机构的各连杆之间的建模以及配合情况,还有制作材料的选择,硬度和疲劳强度等。对每个连杆之间的尺
寸配合要进行细致的分析。利用 NX 对各连杆的建模装配,然后进行运动仿真分析各连杆之间的配合。最后
用 NX 进行有限元分析,分析主要连杆的疲劳强度和受力情况。
关键词:多连杆结构;机械设计;运动仿真;有限元分析;NX
目 录
第一章 绪论............................................................................................................................ 1
1.1 研究意义..................................................................................................................... 1
1.2 研究内容..................................................................................................................... 1
第二章 多连杆机构的建模和理论分析................................................................................ 2
2.1 机构的工作原理......................................................................................................... 2
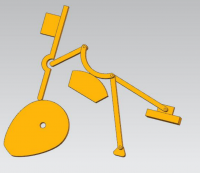
2.2 各构件的设计建模..................................................................................................... 2
2.2.1 凸轮的设计建模.........................................................................................................2
2.2.2 连杆 A 的设计分析....................................................................................................3
2.2.3 连杆 B 的结构和设计建模........................................................................................3
2.3 多连杆机构的装配............................................................................................................6
2.3.1 所有零件装配的流程.................................................................................................6
第三章 多连杆机构的运动仿真..................................................................................................8
3.1 仿真环境的建立................................................................................................................ 8
3.2 定义连杆..............................................................................................................................8
3.3 定义运动副.........................................................................................................................9
3.4 定义驱动...........................................................................................................................11
3.5 定义解算方案和求解......................................................................................................12
第四章 多连杆机构的运动仿真分析........................................................................................15
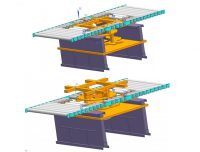
4.1 机构的运动轨迹..............................................................................................................15
4.1.1 标记点的建立...........................................................................................................15
4.1.2 新建追踪...................................................................................................................15
4.1.3 轨迹曲线的显示.......................................................................................................16
4.2 机构的行程分析.............................................................................................................. 17
4.2.1 连杆 6 的位移...........................................................................................................17
4.2.2 连杆 6 的角速度.......................................................................................................17
4.3 连杆 6 的长度对机构的影响............................................................................................18
4.3.1 连杆 6 为 57mm 的长度.......................................................................................... 18
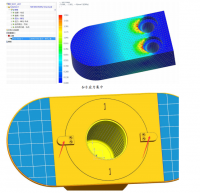
第五章 多连杆的有限元分析.................................................................................................... 20
5.1 仿真文件的建立.............................................................................................................. 20
5.2 对连杆 3 指派材料.......................................................................................................... 20
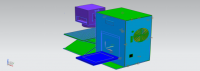
5.3 对连杆 3 网格划分.......................................................................................................... 21
5.4 施加约束与载荷.............................................................................................................. 22
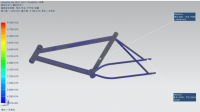
5.5 解答与结果的分析.......................................................................................................... 23
总结...................................................................................................................................................25
致谢...................................................................................................................................................26
参考文献.......................................................................................................................................... 27第一章 绪论
1.1 研究意义
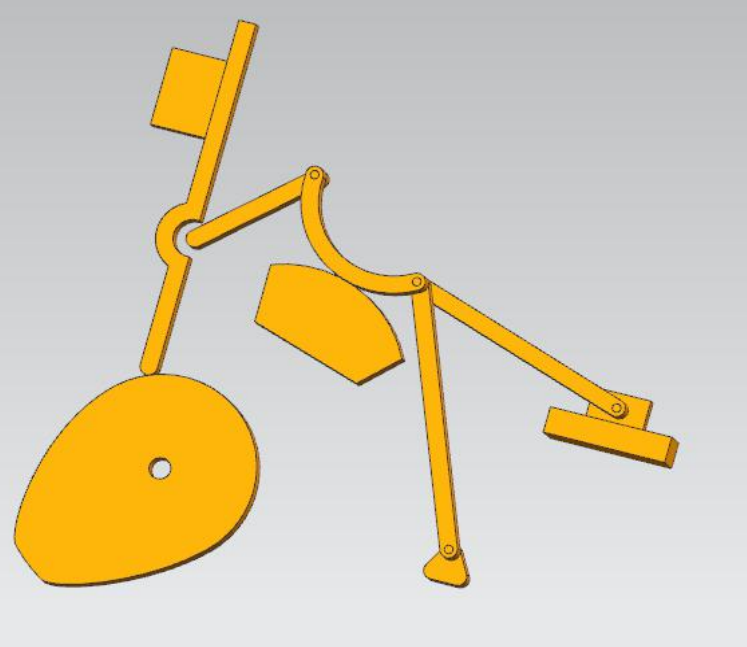
多连杆机构在我们日常生活中虽然不多见,但是在机械等其他领域却十分常
见,所以多连杆机构对我们来说不了缺少的一个。该机构的原理是将凸轮的连续
旋转运动转化成滑块的动力,让它在一定距离内的进行往复运动。所以设计出合
理可行的机构能够为我们提供巨大的便捷,还可以使我们的自己的知识更加的深
厚。这就得我们更加认真的对机构进行假设和时间来证明他的合理性。
由于 NX 软件的功能齐全,可以通过其运动仿真来进一步的解析结构的运动
轨迹,运动时长等一系列因素。以此来设计出最合适的机构图。因为在机械方面
许多东西都是要亲自实践才能得出最终的结果,因此运动仿真这项功能就可以帮
我们解决这个困扰,还可以清楚的知道每个连杆之间所存在的问题,方便继续改
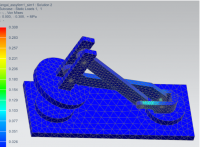
进。这个设计不仅需要进行运动仿真的模拟,有限元分析也是十分重要的一项操
作。通过有限元分析我们可以自己指定设计结构的材料,还能通过它的受力图清
楚的知道它的受力情况。并且能够保证连杆其他位置连接的正确性,各个连杆上
的各个受力点力的载荷是否能够承受,符合它的机构的正确性。
对于连杆机构的 UG 建模、运动仿真以及有限元的操作更加上手,熟练地使
用 UG 里面的建模、快速装配和仿真分析等指令提升了自己的能力。
1.2 研究内容
毕业设计的大体步骤:
①UG 建模多连杆②装配多连杆的运动并仿真分析③多连杆的有限元分析
本论文研究的是复杂组合机构中的多杆机构,该机构重要的是连杆之间的运
动配合。机构通过凸轮的连续整周运动,从而是各连杆只想相互配合带动机构的
运动,即是滑块在一定距离内往复工作。
参考文献
【1】 王兴涛 UG NX 11.0 机械设计案例教 清华大学出版社 2018 年 9 月
【2】 孙开源、张丽杰 常见机构设计及应用图例第二版 化学工业出版社
【3】 李大磊、丁天涛. 机构运动解析与仿真分析 . 北京:化学工业出版社
【4】 华大年、华志宏 连杆机构设计 上海科学技术出版社 2015 年 5 月
【5】 陈继文.机械自动化装配技术[M].化学工业出版社.2019-2-8
【6】 金旭星.机械设计基础[M].人民邮电出版社.2017.1. 【7】 沈春根 孔维忠 关天龙.UGNX11.0 有限元分析基础实战[M].机械工业出版社.2020.1
【8】 吴欣 沈国强 李红霞.基于 Femap & NX Nastran 的有限元分析实例[M].清华大学出版社.2016.8. 【9】 唐昌松.机械设计基础[M].机械工业出版社.2019.12. 【10】 钟日铭.UG NX 11.0 入门.进阶.精通[M].机械工业出版社[M].2018.8参考文献
【1】 王兴涛 UG NX 11.0 机械设计案例教 清华大学出版社 2018 年 9 月
【2】 孙开源、张丽杰 常见机构设计及应用图例第二版 化学工业出版社
【3】 李大磊、丁天涛. 机构运动解析与仿真分析 . 北京:化学工业出版社
【4】 华大年、华志宏 连杆机构设计 上海科学技术出版社 2015 年 5 月
【5】 陈继文.机械自动化装配技术[M].化学工业出版社.2019-2-8
【6】 金旭星.机械设计基础[M].人民邮电出版社.2017.1. 【7】 沈春根 孔维忠 关天龙.UGNX11.0 有限元分析基础实战[M].机械工业出版社.2020.1
【8】 吴欣 沈国强 李红霞.基于 Femap & NX Nastran 的有限元分析实例[M].清华大学出版社.2016.8. 【9】 唐昌松.机械设计基础[M].机械工业出版社.2019.12. 【10】 钟日铭.UG NX 11.0 入门.进阶.精通[M].机械工业出版社[M].2018.8



