






多旋翼无人机可折叠机架设计(说明书+三维SW+CAD)
摘要
随着现代科技的发展,无人机已逐渐成为我们生活中常见的产品,越来越多的无人机应用到实际生活中,但不同行业对于无人机的使用要求不同,对其性能要求也不同。
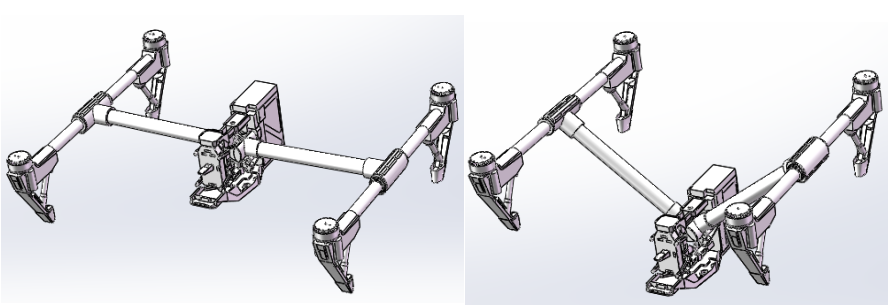
本文主要对无人机的机架结构进行研究,目前,无人机的机架研究技术以相当成熟,但是能够实现无人机在不同的空间环境进行不断的变化的无人机结构研究尚浅。本文主要对无人的可折叠式机架进行研究。首先主要介绍了该项目的研究背景及意义、四旋翼无人机在国内外的研究现状和发展趋势;其次主要对无人机的飞行原理进行介绍,并提出了可折叠机架的设计要求,设计出合适的整体结构;然后对可折叠机架的各个机构进行了详细的设计,各个机构方案设计,运行轨迹、零件的尺寸计算等;主要对机架的材料进行选择,并运用材料力学和理论力学知识对材料的强度进行校核计算;最后运用Solidworks软件绘制出各个零件的三维图,并进行装配,最后对所设计好的无人机折叠式机架进行运动仿真调试。
通过本次毕业设计对无人机的可折叠机架进行了创新性的设计,有利于无人机技术的发展,本人也在此次毕业设计中收获匪浅,将大学所学的理论知识和软件应用到实践设计开发中。
关键词:无人机 折叠机架 Solidworks 连杆滑块
Abstract
With the development of modern technology, the UAV has gradually become the common products in our life, the UAV applied to real life more and more, but different industries for the use of drones in different requirements for their performance are also different.
This article mainly conducts the research on the frame structure, the UAV UAV at present, the frame of technology is quite mature, but can realize the UAV constantly changes in the different space environment of the UAV structure is still shallow. In this paper, we mainly study the foldable frame. This paper mainly introduces the research background and significance of the project, four rotor UAV research status and development trend at home and abroad; secondly focuses on the principle of flight of UAV is introduced, and puts forward the design requirements of the folding frame, designed the overall structure of the right; then on each of the folding rack the detailed design, design agencies plan, track and parts size calculation; mainly to the frame of the material selection and the use of strength of material mechanics and theoretical mechanics of materials calculation; the using Solidworks software to draw a three-dimensional map of each part, and finally the design of assembly. The UAV folding frame motion simulation debugging.
Through this graduation design of the innovative design of the UAV folding frame, conducive to the development of UAV technology, I also graduated in the design of the harvest is shallow, the University of theoretical knowledge and applied to the practice of the design and development of software.
Key words:Aerocraft Folding frame Solidworks Connecting rod slider
第一章 绪论
1.1研究背景及意义
随着科技的进步,无人机得到了大力的发展,根据课题的要求研究多旋翼的可折叠机架的设计,本文以四旋翼无人机做基础进行研究。四旋翼无人机现在已经成为航模界的后起之秀。与固定翼无人机相比之下四旋翼无人机具有结构简单,控制起来非常方便,能够垂直起降,成本非常的低、稳定性也高,机动性非常强等特点。在民用可以代替有人机完成一些任务,在军事上有很强的战场生存能力。因此在这些领域应用广泛,如军事侦查、农林业调查、灾害检测、输电线巡查、玩具航模、航拍、气象探测等。四旋翼无人机的飞行原理虽然简单,但是涉及到的知识面非常的广,从机体结构的设计、传感器滤波算法、控制系统的设计和软件的设计都需要理论的支持。但目前大多数的四旋翼无人机的机架主要采用不可折叠机架,也有很多单位都在研究折叠式机架,但效果不是太好。本次论文对无人机的机架进行设计,有利于推动中国四旋翼无人机的研究发展,为四旋翼无人机在环境保护、气象、火灾、侦查追踪等民用和军用领域实现产业化作出突出贡献。廉价并且高性能的无人机的研究将会拥有巨大的经济效益,能够对我国的科研事业起到巨大的推动作用。
1.2 国内外四旋翼无人机的研究现状
1.2.1国外四旋翼无人机的研究现状
目前国外四旋翼无人机的研究也是主要集中在无人机姿态控制系统的新的理论的研究,比如:神经元网络控制算法、模糊自适应控制算法等。国外还在四旋翼无人机的自主飞行以及多机协同运作等方面有很多研究。下面对一些四旋翼无人机进行简单的介绍:
首先非常具有代表性的是美国Draganflyer公司研发出来的Draganflyer系列四旋翼无人机,如图1.1所示。这种四旋翼无人机主要使用碳纤材料制作,因其载重能力强能携带高清摄像机,因此主要用途为航拍。另外还有Parrot公司研发的AR.Drone无人机也是非常具有代表性,如图1.2所示。AR.Drone可以用手机远程控制,使用MEMS高精度姿态传感器,并且配备多种传感器和摄像头,使AR.Drone可以非常轻松地进行飞行任务。
目录
摘要 1
Abstract 2
目录 3
第一章 绪论 1
1.1研究背景及意义 1
1.2 国内外四旋翼无人机的研究现状 1
1.2.1国外四旋翼无人机的研究现状 1
1.2.2国内四旋翼无人机的研究现状 3
1.3 本文研究内容和方法 4
第二章 总体方案设计 5
2.1无人机结构分析 5
2.1.1无人机机架的功能 5
2.1.2无人机机架的分类 5
2.1.3四旋翼无人机的飞行原理 5
2.2无人机折叠机架的整体设计要求 6
2.3 设计方法 6
2.4 总体结构方案 6
2.5本章小结 7
第三章 主要机构的结构设计 8
3.1各机构的功能 8
3.2主要结构的设计 8
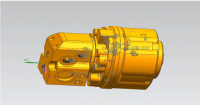
3.2.1动力部分 8
3.2.2传动机构 9
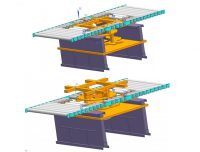
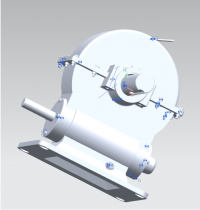
3.2.3升降机构 11
3.2.4承载机构 12
3.3零件的设计 12
3.4本章小结 14
第四章 无人机折叠机架的材料和力学分析 14
4.1碳纤维材料的简介 14
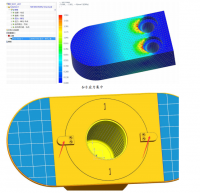
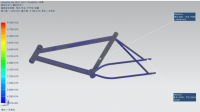
4.2折叠机架的强度计算校核 14
4.3折叠机架的刚度计算校核 16
4.3.1扭转时的刚度计算 17
4.3.2 弯曲时的刚度计算 18
4.4本章小结 19
第五章 可折叠机架的Solidworks三维模型绘制 20
5.1 Solidworks的简介 20
5.2基于Solidworks的建模与仿真 20
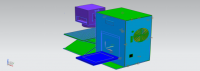
5.2.1零部件的建模 20
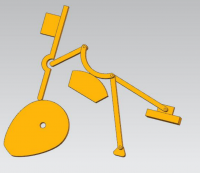
5.2.2机架的装配 22
5.2.3机架的干涉检查 23
5.2.4制作机架爆炸图和动画 23
5.3本章小结 23
总结 24
参考文献 25
致谢 27
参考文献
[1] 田卫军,李郁,何扣芳,刘恒,殷锐. 四轴旋翼飞行器结构设计与模态分析[J]. 制造业自动化. 2014(04)
[2] 程林风,王敏毅,黄朝学. 基于ANSYS的舰载电子机柜振动可靠性研究[J]. 四川兵工学报. 2014(01)
[3] 钟丽娜,王君浩,王融. 基于磁传感器的四旋翼飞行器自主导航设计[J]. 重庆理工大学学报(自然科学). 2013(12)
[4] 张志龙,尹明德,刘进进. 某轻型直升机机身模态分析[J]. 机械工程与自动化. 2013(01)
[5] 岳基隆,张庆杰,朱华勇. 微小型四旋翼无人机研究进展及关键技术浅析[J]. 电光与控制. 2010(10)
[6] 聂博文,马宏绪,王剑,王建文. 微小型四旋翼飞行器的研究现状与关键技术[J]. 电光与控制. 2007(06)
[7] 张艳军. 基于ANSYS对导弹尾翼进行模态分析[J]. 弹箭与制导学报. 2007(02)
[8] 马远超.四旋翼飞行器导航及控制技术研究[D].哈尔滨工程大学,2013
[9] 李尧,四旋翼飞行器控制系统设计[D].大连理工大学,2013
[10] 银金光.机械设计基础[M]. 北京:清华大学出版社,2009.
[11] 王良才,张文信,黄阳.机械设计基础[M]. 北京:北京大学出版社,2007.
[12] 孙恒,陈作模.机械原理[M].北京:高等教育出版社,1999.
[13] 诸文俊.机械设计基础[M].西安:西安交通大学出版社,1998.
[14] 孙桓等.机械原理[M].北京:高等教育出版社(第5版),1996
[15] 基于Matlab的四杆机构优化设计简介[J]. 李建霞,王良才. 机电产品开发与创新. 2010(01)
[16]一种无人机变后掠翼机构的设计与仿真研究[J]. 赵锁珠,李占科,张晓刚. 航空计算技术. 2009(06)
[17]基于Pro/E、ANSYS和ADAMS的动力学联合仿真研究[J]. 许涛,王建平. 机械工程与自动化. 2009(03)
[18]整体式玻璃钢无人机机翼的研制[J]. 李燕银,马军,吴平,朱春生. 洪都科技. 2009(02)
[19] Case C, Suresh B, Coates A. et al. Autonomous sign reading for semantic apping. In: IEEE International Conference on Robotics and Automation, 2011: 3297-3303.
[20] Abbeel P, Coates A, Ng A Y. Autonomous helicopter aerobatics through apprenticeship learning. International Journal of Robotics Research, 2010, 29(13): 1608-1639.



