








管道机器人通讯系统设计
摘要
目前各种管道运输已成为输送液体、气体等能源的经济安全的运输方式,并在油气运输业中被广泛应用。为确保管道的安全运行,常需要对其进行检测,其中磁通漏失检测就是进行管道内部检测常用的一种有效方法,而管道机器人是实现漏磁监测和记录的一种设备。其中,数据采集技术是管道机器人系统中的关键技术之一,它不仅能够采集各种信息,而且还能够将这些信息存储以供后续分析。课题就是针对管道机器人中的数据采集及传输部分进行设计与研究,给出了设计实现方案,实现了通过A/D转换电路完成既定精度的数据采集和大容量存储,完成了USB总线技术对数据与上位分析软件之间的传输与通信,对管道机器人的研制工作具有十分重要的意义。
论文首先给出了管道机器人的组成和工作机理,分析了管道机器人的结构特点,构建了基于USB的管道机器人数据采集及传输系统。系统设计主要包括硬件和软件设计两部分,硬件部分系统选用了ATMEL公司的单片机PIC18F25K22作为微控制器核心,电路设计包括数据采集电路、数据存储电路、USB通信接口电路、JTAG调试接口电路、复位电路、系统电源电路以及系统的电路板设计,详细给出了工作原理和电路实现。然后,在Keil C51开发环境中进行数据采集及传输系统主程序、采集程序、FLASH存储程序、USB通信的设备端程序及系统固件程序的设计,USB通信的主机端程序及上位机应用程序结合面向对象的程序设计语言VC++开发,设计了人机交互分析界面,实现了采集数据的传输和图形显示分析功能,给出了各部分程序的软件流程图和实现步骤。最后,对数据采集及传输系统的硬件和软件功能进行测试,验证了本系统设计的合理性,在设计的数据采集及传输界面上实现了对采集信号的显示和分析。通过仿真实验验证,本系统的设计能够实现基于USB总线的漏磁检测数据采集及传输功能,系统工作稳定。由于选用了内置USB控制器的PIC18F25K22作为微控制器,其lO位200Ksps的A/D转换器实现了数据的高速采集,并且结合SAMSUNG公司128MB的K9F1G08UOA型Flash存储器作为系统外部存储器,较好的实现了该管道机器人高检测率、大容量存储等特性。
关键词:管道机器人;数据采集;传输系统;USB通信
The design of the pipeline robot communication system
Abstract
The pipeline transportation has become the transportation of liquid and gas and other energy economic safe mode of transport, and is widely used in oil and gas transportation. In order to ensure the safe operation of the pipeline, often need to detect, the magnetic flux leakage detection is internal inspection of piping a useful and effective method, and pipe robot is to realize a leaky magnetic monitoring and recording equipment. Among them, the data acquisition technology is the key technology of pipeline robot system, it can not only collect all kinds of information, but also can store this information for subsequent analysis. This paper is the for the design and research for the pipeline robot data acquisition and transmission parts, gives the design scheme, the A / D conversion circuit to complete the established accuracy of the data acquisition and high capacity storage and the USB bus technology on the transmission and communication between data and epistasis analysis software, for the development of the pipeline robot has very important significance.
This paper first describes the composition and working mechanism of pipeline robot, analyzes the structure characteristics of the pipeline robot, constructed the USB pipeline robot data acquisition and transmission system based on. System design includes hardware and software design of two parts, hardware parts of the system selects ATMEL microcontroller PIC18F25K22 as micro controller core, the circuit design including data acquisition circuit, data storage circuit, USB interface circuit, JTAG debug interface circuit, reset circuit, the system power supply circuit and system circuit board design, the detailed working principle and circuit implementation. Then, in the Keil C51 development environment of main program of data acquisition and transmission system, acquisition program, the program stored in the flash, USB communication equipment terminal program and system firmware design, USB host program and PC application combined with oriented object programming language VC + +, the human-computer interaction analysis interface is designed and realized the data acquisition transmission and graphical display and analysis function, gives the various parts of the program flow chart of the software and implementation steps. Finally, the hardware and software function of data acquisition and transmission system tested to verify the rationality of the system design, in the interface of data acquisition and transmission realizes display and analysis of the signal acquisition. The simulation results show that the system can achieve the data acquisition and transmission function of magnetic flux leakage testing based on USB bus, and the system is stable. The PIC18F25K22 microcontroller with a built-in USB controller, the lo 200ksps of the A / D converter realized high-speed data acquisition, and the combination of Samsung 128MB of K9F1G08UOA type flash memory as the system of external memory, better realization of the characteristics of the pipeline robot with high detection rate and large capacity storage.
Key words: pipeline robot; data acquisition; transmission system; USB
目录
第1章 绪论 5
1.1课题的研究背景、目的和意义 5
1.2管道机器人的国内外研究现状 6
1.3基于USB的数据采集系统研究现状 7
1.4课题的主要研究内容 9
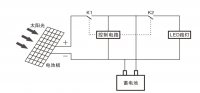
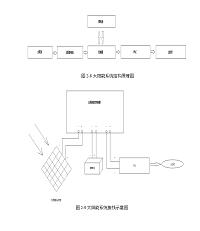
第二章 管道机器人的总体设计方案 10
2.1管道机器人漏磁检测的特点 10
2.2管道机器人漏磁检测的特点分析 10
2.3管道机器人漏磁检测结构 10
2.4系统方案设计 12
2.4.1数据采集及传输系统总体方案设计 12
2.4.2数据采集及传输系统硬件设计方案设计 13
2.5本章小结 14
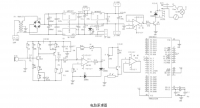
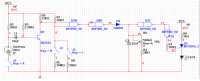
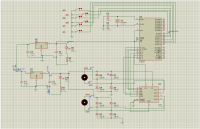
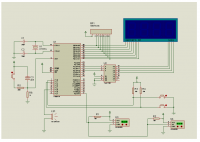
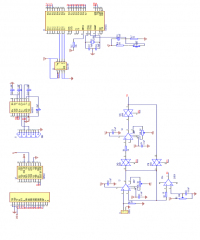
第3章 系统的硬件设计 15
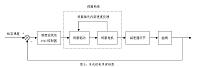
3.1 系统硬件框图 15
3.2 传感器 15
3.2.1 电压型温度传感器LM35D 15
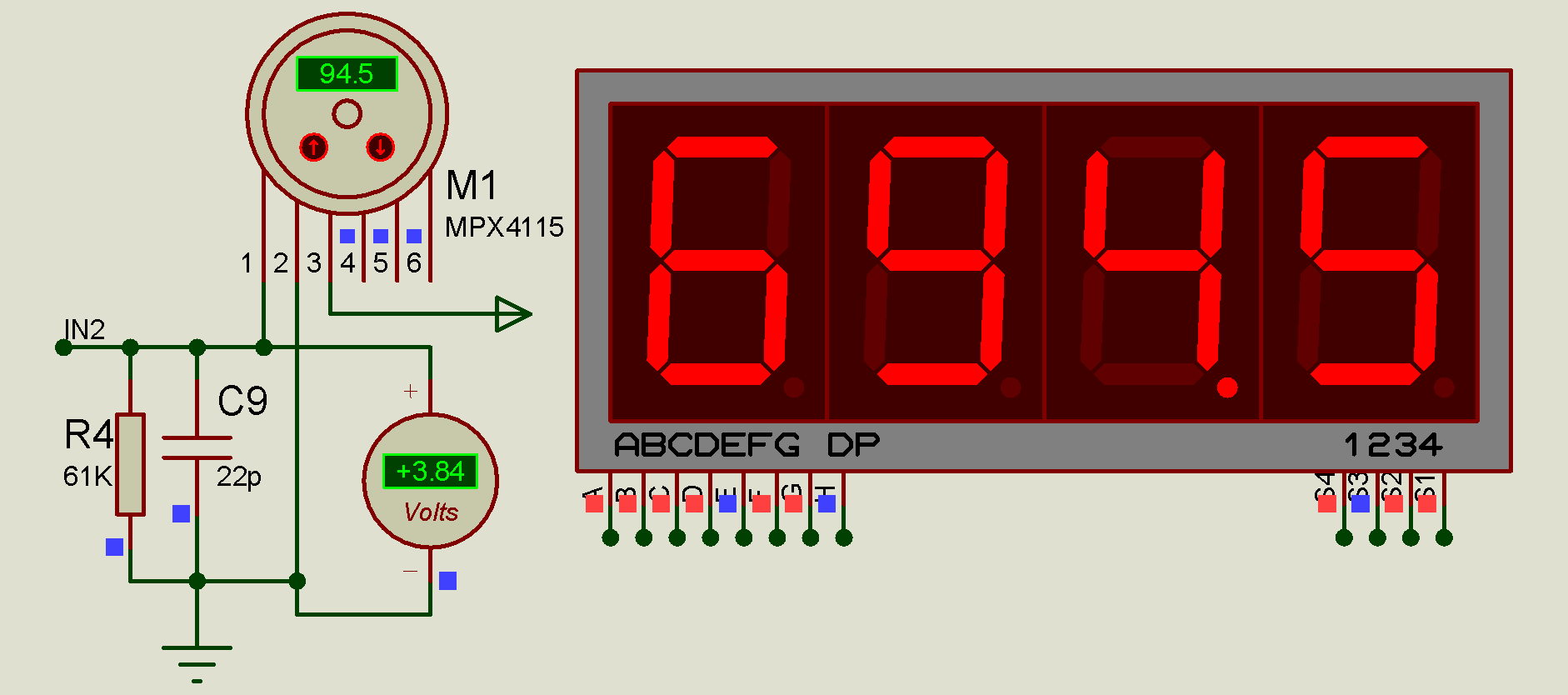
3.2.2 气压传感器MPX4115 16
3.3 A/D转换电路 18
3.3.1 ADC0809的介绍 18
3.3.2 ADC0809时序图 20
3.4 单片机电路 20
3.4.1 PIC18F25K22说明 21
3.4.2 单片机最小系统 25
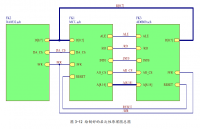
3.5 上位机通信电路 27
3.6 显示电路设计 28
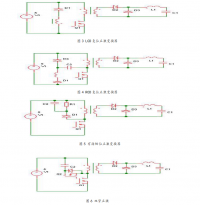
3.7 电源电路 28
3.8 本章小结 29
第4章 系统的软件设计 30
4.1 Keil uVision3简介 30
4.2 程序设计 30
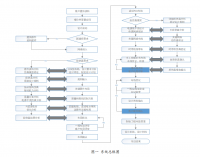
4.2.1 主程序流程图 31
4.2.2 LED数据显示子程序 32
4.2.3 串口初始化子程序 32
4.2.4 串口通信子程序 33
4.3 程序调试结果 34
4.4 本章小结 36
第5章 系统仿真 37
5.1 系统仿真使用工具介绍 37
5.2 系统调试结果与分析 38
5.3 本章小结 42
结论 43
参考文献 44
附录 45
参考文献
[1] 沈兰荪.高速数据采集系统的原理及应用[M].北京:人民邮电出版社,1995.
[2] 李朝青.单片机原理及接口技术[M].北京:航空航天大学出版社,1999.
[3] 李群芳等.单片微型计算机与接口技术[M].北京:电子工业出版社,2005.
[4] Frank J,Meixner H.Sensor System for Air Monitoring Using Semiconducting Metal Oxides and IR-absorption[J]. Sensor and Actuators B,2001,78:298-302.
[5] 贾金玲.单片机原理及应用[M].成都:电子科技大学出版社:2004.
[6] 张毅刚,刘杰.MCS-51单片机原理及应用[M].哈尔滨:哈尔滨工业大学出版社,2004.
[7] 杨颂华,孙万蓉等.数字电子技术基础[M].西安:西安电子科技大学出版社,2000.
[8]臧铁军,臧天红.我国管道运输的发展概况.管道技术与设备.1998,4:1-4页
[9]李强.管道机器人视像检测系统的研究与实现.大庆石油学院硕士学位论文.2007:1-2页
[10]JiaYonghong.USB Interface Data Acquisition System Hardware Design.May,2006:30—34P
[11]孙麟治,陆林海,秦新捷,龚振邦.微型机器人用于检查管道内的缺陷.光学精密工程.2003,ll(1):456-463页
[12]贾守波.城市排水管道机器人工程样机的研究.哈尔滨工程大学硕士学位论
文.2008:6页
[13]丁毅,汪如红,姜晨颖.管道机器人发展状况及其在包装领域中的应用.包装与食品机械.2009,27(5):129页
[14]姜玉梅.长输油气管道环境污染事故的预测与预防.油气储运.1999,18(6):44.46 页
[15]王琳,商周,王学伟.数据采集系统的发展与应用.电测与应用.2004,41(464):4.5页
[16]王栋.基于USB的数据采集系统设计.苏州大学硕士学位论文.2009:2.3页(5):1-7页
[17]唐宝成.基于C8051F020单片机的数据采集系统设计.应用科学.2010,(4):6页
[18]张泽天.机器人控制系统中基于嵌入式的USB接口无线网卡驱动开发.无损检测.2010:33—34页
http://www.bysj1.com/ http://www.bysj1.com/html/5215.html http://www.bysj1.com/html/5215.html



