








智能多维AGV小车的设计
摘 要
AGV小车的全称是自动导引小车(Automatic Guided Vehiele),AGV小车是通过磁场或者激光这些导向装置,在计算机程序的控制下,在规定的路径上完成工作的自动无人驾驶的小车,通过伺服驱动及驱动。AGV小车的出现为现代制造业以及物流提供了更快捷以及高度自动化的运输方式。
在当前的时代,AGV小车被广泛的运用在制造业、物流工作、造纸等行业。现在我们更努力的设计一种操作简单,智能多维的AGV小车是适应的时代发展的,它可以适应在各种工作环境之中,使它这门技术有了更进一步的发展。
本论文主要介绍的是比较简单的构造模式,是在仿真汽车的驱动结构的基础上,让其简单化,小车的后轮是通过驱动电机和齿轮传动来两者来达成运动的。而它的前轮则是通过伺服电机来实现转向。
关键词:AGV小车;激光导引;驱动电机
Abstract
The full name of AGV car is Automatic Guided Vehiele. AGV car is driven and driven by servo through magnetic field or laser guided devices. Under the control of computer program, it works on the prescribed path. The emergence of AGV car provides a faster and highly automated mode of transportation for modern manufacturing and logistics
In the current era, AGV car is widely used in manufacturing, logistics, papermaking and other industries. Now we are working harder to design a simple, intelligent multi-dimensional AGV car, which is suitable for the development of the times. It can adapt to a variety of working environments, so that it has a further development of this technology.
This paper mainly introduces a relatively simple construction mode, which is based on the simulation of the driving structure of the car, to simplify it. The rear wheel of the car is driven by the driving motor and gear drive. And its front wheel also has servo motor to realize steering.
Keywords:AGV car; laser guidance; servo drive
第一章 序言
1.1论文研究的背景及意义
随着科技的发展,一个全新的未来就为制造业敞开了大门,接下来企业的领头羊就变成了敏捷制造业,让各行各业飞速发展。能否抓住市场改变这一机遇而做出改变从而开发出全新的重要产品将会是各企业能否赢得它们之间竞争的重中之重。企业想要减少产品的生产成本从而增加自己的利益并且让产品有质量上的保证,就必须要将敏捷制造贯彻到底。在压力重的制造里面我们可以用生产小批量的工作量完成超越任务几倍,达到中等或者大量的工作量,这里就用到了制造业里面的三个能力,它们分别就是:可以自己编制程序、可以重新进行分组重合还有它遇到障碍之后的迅速给出反应的能力,在可以重新分散组合的生产系统里面机器人为什么可以在里面有非常重要的地位,并且能够给以往的缔造型工厂一步跨越成为敏捷制造企业提供如此重要的技术支撑,重点就是因为机器人的一些重要的特质,其中主要包括了四点,分别是可以通过编程控制、协调作业以后控制、自己规划自己的内容控制还有使用传感器来控制。这样我们所想的智能多维的AGV小车能在现在的物流行业和工厂的制造中占据主要的地位,就是因为它是属于了这样的可以自己工作自己移动的机器人,其主要功能是用于搬运并存储材料,主要可以确保系统的柔性化、集成化以及高效运行。我们现在只基本是用两种AGV,其一是路径不能动的AGV,很明显从名字来看就可以知道这种AGV的运动路线是有特定的轨道的,所以它的导引技术就会简单一些;其二就是自由路径AGV,言简意赅就是它的轨道不固定,由于没有具体的路线,它就最大程度的给了AGV运动的自由。但是由于现在科技的限制,AGV自由运动这一个问题依旧是一个有待我们去思考并且需要我们未来科技去解决的技术难题。
生产线上,之前我们就比较习惯用导向性的AGV,小车行动的方法就分为在导轨上行动和用电磁来牵引的方法。一开始就选择好行动线路就是这些小车的缺点,并且在车间里很多设备是无法随意移动的。越来越多的智能型生产装置在工厂里出现, 这样就大大减少了AGV的自由,就因为导向的AGV。所以,敏捷制造物流系统当中比较优越的选择就是非导向性的AGV。我们有了不需要导向的AGV系统,AGV的行动路线就和附加的设备没有任何关系了,现在车间里的布局因为这些智能化的生产设备而变化,改变AGV的行动路线就变得简单了,我们只需要改变一下程序里的参数就可以完成了。
资料表明:产品在设备中生成的时候,用在加工产品和生成产品的时间占得比数是很少的,只有5%,而用于储存、装卸和等待加工以及输送上面的时间占得比数就多了占据了95%,人力和物力就大大的损失了。10%这就是美国这个国家的劳动成本在生产成本里面占据的比例,这还不是现在的极限值,这个值还在持续减少,然而生产成本中的40%就是花费在了人力和物力的运输和储存上,也就是说能不能减少这些人力和物力的损失就是世界各个国家能不能在工业竞争的时候取得成功的重点,现在的工厂里的生产环境必须赶快适应。
我们国家中汽车和烟草的生产商就早早看出了以上所说的AGV优势,把它提前的放进了生产之中,成效也很明显的出现了,为这些厂家赚取了一大笔利益,让企业获得了相当可观的经济效益。但观察它的使用方法,固定路径的导向性的电磁导引AGV还是用的比较多,没有固定路径的AGV还面临着许多的问题,这些问题暂时还不能得到完美的解决,所以就还没有达到正式使用的情况。因此对于自动路径、智能多维AGV的研究就有这十分重要的含义。因为不仅敏捷物流设备的研究需要它,这一项技术对于机器人的自己独立行动还有很重要的作用。
目录
第一章 序言 1
1.1论文研究的背景及意义 1
1.2智能多维AGV小车的定义及特点 2
1.3智能多维AGV小车的应用现状以及发展史 3
1.4 AGV的关键技术以及本论文的研究内容 5
1.4.1 AGV小车的关键技术 5
1.4.2 本论文研究的主要内容 5
1.5 本章小结 6
第二章 AGV系统结构设计以及动力学建模 7
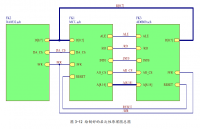
2.1 AGV系统结构设置 7
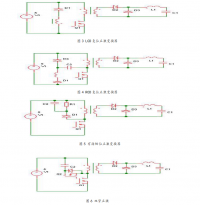
2.2 AGV小车的动力学模型以及相关方程 7
2.3 本章小结 10
第三章 AGV中机械部分主要零件的选取 11
3.1 伺服驱动电动机的选取以及参数 11
3.1.1 电动机的结构图记忆只要参数的选取 12
3.1.2 伺服电机的选取过程 13
3.1.3 减速器的选取和适用范围 14
3.2 伺服电机以及其控制 14
3.2.1伺服驱动电动机的工作原理 14
3.2.2 伺服电动机控制参数 15
3.3 轴的设计以及参数的计算 15
3.3.1 轴的设计方法 15
3.3.2 小车驱动轮的轮轴设计 16
3.3.3 车轮收的受力分析以及校对 17
3.3.4 车轮轴承的受力分析和校对 18
3.4 齿轮的设计以及选取 19
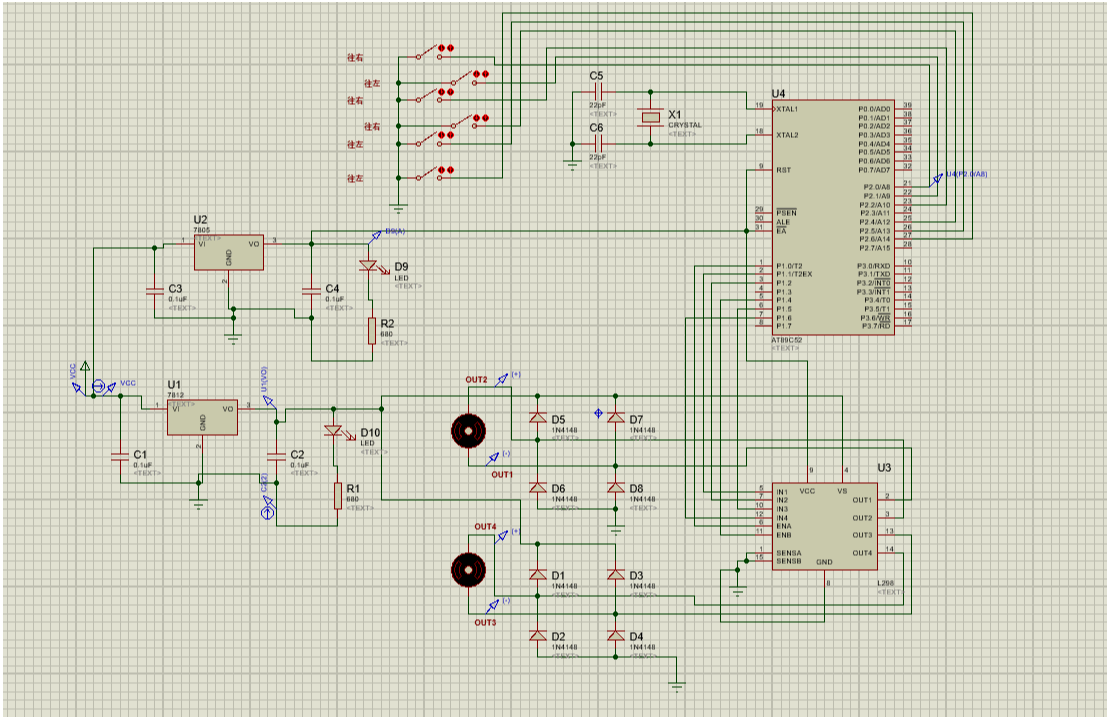
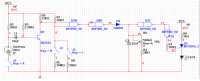
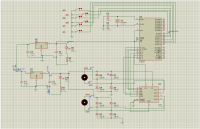
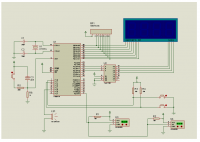
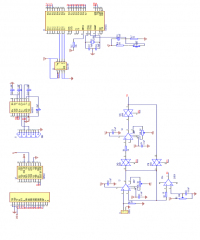
3.5AGV小车的电气原理图 20
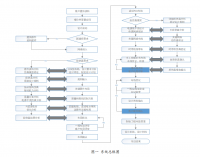
3.6 AGV小车控制流程图 21
3.7AGV小车控制简要程序 21
3.8本章小结 23
第四章 结论和展望 24
4.1 结论 24
4.2 展望 25
参考文献 26
毕业设计附录目录 27
参考文献
[1] 邱宣怀.机械设计.北京:高等教育出版社,1997(2006重印)
[2] 罗圣国.龚掕义.机械设计课程设计指导书.高等教育出版社1990.4
[3] 王德夫.姜勇.李长顺.韩学栓.机械设计手册:北京:化学工业出版社:1997年
[4] 陈顺平.梅德庆.陈子辰.激光导引AGV的自动导引系统设计.工程设计学报.2003.10(5):279-282
[5] 陈顺平.梅德庆.陈子辰.激光导引AGV的自动导引系统设计.机电工程.2003.20.(5):87-8
[6] T.立贤.汀滨琦.用单片机实现步进电机变速控制的方法.应用科技.2003.30(1):42-42.54
[7] 李海波何雪涛.步进电机升降速的离散控制.北京化工大学学报.2003.32(1):92-94.
[8] 宋小鹏.盛仲 FA.多功能步进电机控制器软件设计.华北工学院学报.2003.24(1):58-61
[9] 陈细军.谭明.VC编程中的串口通信技术.计算机应用.2001.21(9):94.95
[10] 王宏伟.昊建设.基于VC++6.0的串行通信设计与实现.黄石高等专科学校学报.2003.19(2):16-19
毕业设计附录目录
(1)开题报告
(2)任务书
(3)中期检查表
(4)AGV小车的电气原理图
(5)AGV小车的程序流程图
(6)AGV小车简要相关程序



