





















工业机器人在线示教编程应用实例
.1实例一
3.1.1简要说明
(1)下面说明机器人对工件的加工过程及其程序编写
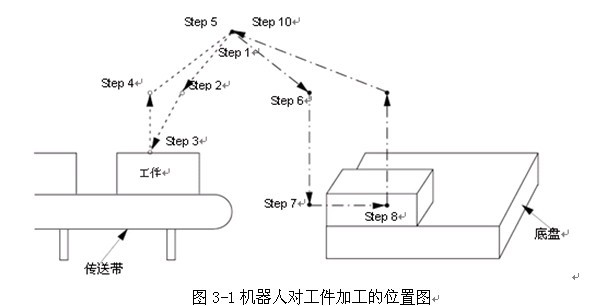
图3-1机器人对工件加工的位置图
表3-2程序指令及解释
序号 指令 解释
0000 NOP
0001 MOVJ VJ=25.00 移动到备用位置 step1
0002 MOVJ VJ=25.00 移动靠近夹持位置 step2
0003 MOVL V=100.0 移动到夹持位置 step3
0004 HAND 1 ON 夹持工件
0005 TIMER T=0.50 等待知道夹持工件完成
0006 MOVL V=100.0 移动离开夹持的位置 step4
0007 MOVJ VJ=25.00 移动到备用位置 step5
0008 MOVJ VJ=25.00 移动靠近释放位置 step6
0009 MOVL V=100.0 移动到准备释放位置 step7
0010 MOVL V=50.0 移动到释放位置 step8
0011 HAND 1 OFF 释放工件
0012 TIMER T=50.0 等待直到释放工件的过程完成
0013 MOVL V=100.0 从释放工件处移走 step9
0014 MOVJ VJ=25.00 移动到备用位置 step10
0015 END
(2)程序编写中所运用的指令这些指令用来打开和关闭安装在机械臂每个手及它们对应的单,双和三重螺线管,最多可控制四手。
(3)用以下电磁信号控制,可根据指示开关阀门
表3-3(阀门 1/2 各螺线管运行的条件)
SP(单电磁铁)2P(双螺线管)3p(三螺线管)
(4)其他项目的示教指令
机械手(hand):(1)机械手序号:(#1 or #2)
(2)工具(tool) :(1 to 4)
(3)工具(tool)的输出状态:(ON/OFF)
(4)全部被控制:ALL(阀门同时开或关)
3.1.2示教程序步骤解释
Step2.step3:工件靠近及移动到夹持位置;Step4:工件被夹持位置;Step6.7.8.9:工件被释放位置
(1)Step2靠近夹持(被夹持之前)
a.开始夹持之前,使机械手保持正确的姿势,选择一个方向,使工具和工件不影响机械手
b.按[ENTER]。进入第2步
图3-4 第2步程序
(2)step3 移动到夹持位置
移动机械手到夹持位置,与步骤2中的姿势保持一致,接下来输入命令
a.选择中等的速度,按[FAST] 或 [SLOW].进行调整
b.移动到夹持位置
c.按[MOTION TYPE].,选择线性插件”movl”
d.当光标锁定下面的字符,按[SELECT].
MOVL V=11.0
e.输入缓冲区一行。将光标移动到数字“V = 11.0”,这显示了速度。按[SELECT],使输入。然后,输入所需的值:100毫米/秒,按[ENTER]。
f.按 [ENTER] 进入step3
图3-5第3步程序
g.按 [TOOL1 ON/OFF]
h.按[ENTER]
k.按下[INFORM LIST],显示后移动光标移动到“control”,然后按[SELECT]。然后,移动光标移动到“TIMER”,然后按[SELECT]。
l.当定时器t = 1.00显示出来,选择输入缓冲区一行。移动光标到T= 1.00,(显示了时间。)按[SELECT],使数字输入。然后,按[ENTER]键输入所需的值:0.5秒。
m..按 [enter]。时间被输入
n.按[INFORM LIST],把[INFORM LIST]键按灭
(3)Step4
a.移动离开夹持位置,注意不使设备和工具阻碍它
b.光标位于MOVL V= 11.0,按[SELECT]。
c.输入缓冲区一行。将光标移动到数字权利的“V = 11.0”,这显示了速度。按[SELECT],使输入。然后,输入所需的值的100.0毫米/ s,按[ENTER]。
d.按[ENTER]。第4步输入
图3-6 第四步程序
(4)Step6 移动到释放位置
a.使机械手保持正确的位置
b.按[MOTION TYPE] 设置插件(MOVJ)
MOVJ V=0.78
c.按 [SELECT]
d.输入缓冲区一行。将光标移动的“MOVJ V=0.78,”这显示了速度。按住
[Shift]的同时,移动光标向上和向下(向更高速度和较低的速度),直到所需
的值。设置速度25.00%。SHIFTMOVJ南军= 25.00。
e.[ENTER]。第6步输入。
(5)Step7移动到准备释放位置
a.按[MOTION TYPE]设置线性插值(MOVL)
MOVL V=11.0
b.按[SELECT]
c.光标移动到数字“V = 11.0”,(显示了速度) 按 [SELECT]输入所需的值100.0毫米/ s,按[ENTER]
d.ENTER]。第七步是注册。
图3-7第七步程序
(5)Step8 释放工件位置
a.变为中速,按[FAST] 或[SLOW]调节
b.从step7移动到预定位置
c.光标位于 MOVL V= 11.0按[SELECT],使输入。然后,输入所需的值的50.0毫米/ s,按[ENTER]。
d.按[ENTER]。STEP8输入
图3-8第8步程序
e.按 [TOOL1 ON/OFF] ,
f.将光标移动到右“ON”,表明状态。同时按住[Shift],直到“OFF”显示。
g.按[ENTER],输入
h. 按 [INFORM LIST],显示后移动光标到“CONTROL” 接下来按[SELECT],移动光标到“TIMER”,然后按[SELECT]
j.移动光标到定时器t = 1.00按[SELECT],然后,按[ENTER]键输入所需的值0.5秒。
k. 按 [ENTER]。该定时器指示被输入
l.按[INFORM LIST],关闭告知清单。




