





















可翻转爬行机器人机构设计与优化
一、题目来源、目的、意义
题目来源:自拟
目的和意义:随着机器人的应用日益广泛,机器人执行任务的环境越来越复杂
和恶劣,如考古探测、星际探索、军事侦察等领域,这要求机器人具有很强的
地面适应性和越障能力,针对弹跳机器人落地后的翻转恢复问题,目前的研究
主要集中在理论和试验探索研究阶段,对于机器人完全实现翻转以及翻转的优
化等问题尚存在不足。因此,本课题将针对移动弹跳机器人在弹跳落地之后产
生的翻转问题,从自然界生物的翻转运动中得到启示,进行了翻转机构的设计,
并通过ADAMS进行仿真。
二、主要工作内容
1、查阅文献资料,研究生物翻转时的翻转机理。
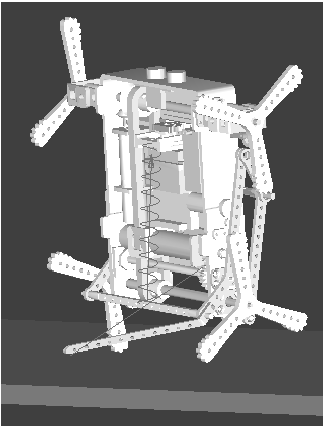
2、从生物姿态恢复过程的研究中得到启示,设计一种可供支撑和旋转功能的机
构,来实现机器人的翻转。
3、对可翻转爬行机器人机构进行三维零件造型和模型整体装配,仿真机器人的
整个翻转过程,并对机构尺寸进行优化设计。
4、按照要求撰写毕业设计说明书及绘制相关图纸。
5、完成一篇相关文献的翻译。
三、主要技术指标(或主要论点)
1、可翻转机器人爬行机构能实现180°翻转;
2、对翻转杆件的转动角度进行优化,实现翻转杆转动80°时,机器人成功翻转;
3、在实现翻转的前提下,进行翻转杆件的角度优化设计,使杆件的长度最短,
质量最轻;
4、采用四杆弹跳机构实现机器人的跳跃;
5、翻转过程中重心变化没有明显的波动。
四、进度计划
第1-3周:文献调研,完成英文文献的翻译, 完成开题报告的撰写。
第4-5周:确定可翻转机器人爬行机构的整体方案,比较各种方案的优越性和
不足之处,选择一种合理的结构形式。
第6-7周:选用Solidworks软件对所设计的可翻转机器人爬行机构进行三维造
型设计。
第8-9周:对可翻转机器人爬行机构进行杆件优化设计,包括翻转杆转动角度、
长度优化等。
第10-13周:绘制机械图纸,撰写毕业论文。
第14-15周:毕业论文一次与二次查重,修改。
第16周:毕业论文答辩。
五、主要参考资料(外文资料至少一篇)
[1] 葛文杰,沈允文,杨方.仿袋鼠机器人跳跃运动步态的运动学[J].机械工程学报,2006,42(5):22-26.
[2] 李保江,朱剑英. 弹跳式机器人研究[J].机械科学与技术,2005(24):803-807.
[3] Saeed B., Nik著,孙富春等译.机器人学导论[M]. 北京:电子工业出版社,2004.1.
[4] 郑文纬.机械原理[M].高等教育出版社,2000.
[5] FIORINI P,BURDICK J. The development of hopping capabilities for small robots[J]. Autonomous Robots,2003,14(2):239-254.
[6] 白井良明著.机器人工程[M]. 北京: 科学出版,2001.1.
[7] Maya M, Castillo E, Lomelí A, et al. Workspace and payload-capacity of a new reconfigurable delta parallel robot[J]. International Journal of Advanced Robotic Systems, 2013, 10.
[8] STEEVE M,ERICK D,HENRI C. Mechanical design of a hopper robot for planetary exploration using SMA as a unique source of power[J].Acta Astronautica,2008,62(6-7):438-452.
[9]王兰美.机械制图[M].高等教育出版社,2004.
[10] 陈殿生,黄宇,王田苗. 轮式腿型机器人的越障分析与仿真[J]. 北京航空航天大学学报,2009,35(3):371-375.




