





















家用服务机器人设计(说明书+cad图纸)
摘要
近年来,随着计算机技术的飞速发展,机器人的研究及应用得到迅速发展,因其在教育,医疗,军事,工业等领域的巨大应用,因此得到许多国内外科学家的关注。使用计算机代替人眼及大脑直接对景物环境进行感知、解释和理解一计算机视觉已经成为计算机领域的一个热点问题,而作为计算机视觉的重要组成部分的物体跟踪也同样越来越受到人们的重视,对其的研究已获得大量的成果
机器人主要是用来支撑用户身体,辅助用户行走,并且保证行走安全性和平稳性。设计的主要目的是:满足采用人体工学的机构优化设计,材料轻型化,并且实现机构的便携性。助行机器人的底盘是整个机器人机构设计的基本机构,是安装助行机器人电机以及其他各个部件的整体支撑,它接受电机的动力,主要实现在不同路面下正常行走。底盘行走机构主要包括前轮驱动机构、后轮驱动机构 以及四轮驱动机构.
digest
In recent years, with the rapid development of computer technology, the research and application of robots has been developed quickly, because of its in education, medical, military and industrial areas such as huge application, thus to get the attention of many scientists at home and abroad. Using computer replace the human eye and brain directly for perception and interpretation of the landscape environment and understand a computer has become a hot issue in the field of computer vision, and as an important part of computer vision object tracking is also more and more get people's attention, the study of its has won a lot of results
Robot is mainly used to support the user body, auxiliary user to walk, walk and ensure the safety and stability. The main purpose of design is to: meet the mechanism optimization design of ergonomics, light-duty materials, and implementation mechanism of portability. A walker robot chassis is the basic organization of the robot mechanism design, is to install a walker robot motor and other parts of the overall support, it receives the motor power, the main implementation under different road walk normally. Chassis walking mechanism mainly includes the front wheel drive mechanism, rear wheel drive and four-wheel drive mechanism
调研报告
随着社会发展和科技进步,机器人在生产生活中得到越来越多的应用,其中,工业机器人大多都是机械臂使固定机器人。而还有很多机器人可以根据人们的需要按照预订路径进行移动,这类机器人即为移动机器人其移动机构又分为轮式、履带式、腿式、跳跃式和复合式。每种机器人都有其特定的制造方式和功能。其中,轮式机器人,既以驱动轮子来带动机器人进行移动和工作的机器人。虽然其运动稳定性与路面的路况有很大关系,但是由于其具有自重轻、承载大、机构简单、驱动和控制相对方便、行走速度快、工作效率高等特点,从而被广泛应用。
机器人是一种高自动化的高科技产品,它的诞生,是各个学科交叉应用的结果。如今,研制一种机器人就需要从各个科学领域对其进行研究和创新。一般而言,机器人的主要技术如下:机器人机构、导航和定位、路径规划、传感器技术、控制技术、移动机器人传感器技术、屏蔽技术等。
机器人是一种仿生的高科技产物。服务机器人的出现,为人们的生活和科学发展做出了十分接触的贡献。在工业、农业、反恐、防爆、空间探测等各个领域,服务机器人都可以代替人类完成一些危险或者不可完成的任务。如何控制服务机器人按照我们需要的方式进行移动和精准的动作是十分重要的一个环节。另外,如今,机器人已经向着更为宏观和微观的方向发展,相信,在不久的将来,在更为精准的设计和控制下,服务机器人将会为我们带来更为美好的生活!
目录
引言 10
总体方案的论述 12
2.1方案的选择 12
2.2机械手的描述 13
2.3行走机构的描述 13
2.4机器人其它部位的描述 13
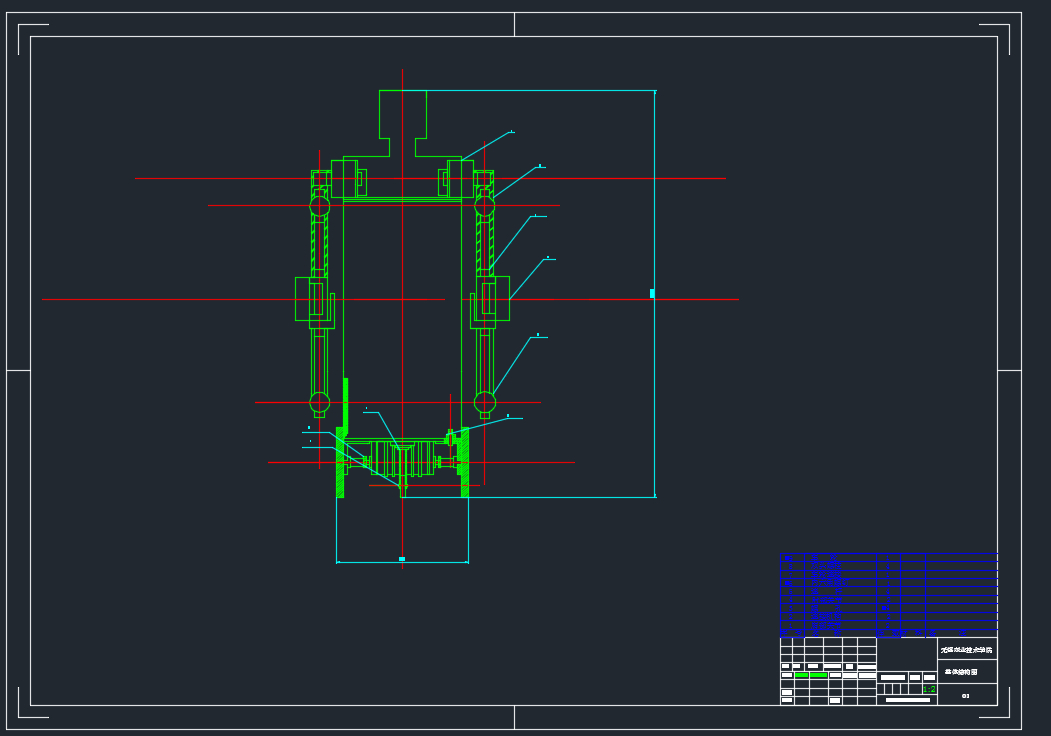
2.5机器人的结构草图 14
机器人机械手的设计计算 14
3.1 机械手的参数确定 14
3.1.1 结构参数 14
3.1.2 运动参数 14
3.1.3关节的运动参数 14
3.1.3.1纵关节步进电机的选择 14
3.1.3.2谐波齿轮传动机构的介绍 15
3.1.3.3 纵关节谐波齿轮传动机构的设计计算 15
3.1.3.4横关节的步进电机及其谐波齿轮参数 16
3.2 纵关节的结构草图 16
3.3 横关节的结构草图 17
3.4 纵关节的校核 18
3.4.1步进电动机 18
3.4.2步进电动机 18
3.5 制动及原理 19
机器人行走机构的设计计算 20
4.1 参数的确定 20
4.1.1结构参数和运动参数 20
4.1.2动力参数 20
4.2 行走机构的草图 21
4.3行走机构的校核 21
4.3.1常规Mecanum轮的结构特征及运动特性: 21
4.3.2负载与行走稳定性对结构的要求 23
4.3.3系统结构及实现多向运动原理 24
4.3.4 对行走机构减速电机的校核 26
机器人其他重要部位的校核和装配 27
5.1 机械手的固定 27
5.2 固定机械手螺栓的校核 27
5.3 机器人的装配 28
结 论 29
致谢 30
参考文献 31
引言
近年来全球家用机器人发展迅猛,联合国日前公布的一份调查显示,到2007年末,家用机器人数量将会上涨6倍,而且随着机器人的普及,其价格将会大幅下降。
从机器人诞生到本世纪80年代初,机器人技术经历了一个长期缓慢的发展过程。到了90年代,随着计算机技术、微电子技术、网络技术等的快速发展,机器人技术也得到了飞速发展。除了工业机器人水平不断提高之外,各种用于非制造业的先进机器人系统也有了长足的进展。
服务机器人是机器人家族中的一个年轻成员。到目前为止尚没有一个严格的定义,不同国家对服务机器人的认识也有一定差异。服务机器人的应用范围很广,主要从事维护、保养、修理、运输、清洗、保安、救援、监护等工作。
在国内,智能轮椅上已经取得突破性进展,上海交通大学和上海电气集团联合研制出智能轮椅样机。它的人机接口包括操纵杆、鼠标和键盘和触摸屏等,传感器系统包括视觉、声纳传感器环、红外传感器环和碰撞传感器,能够实现避障、避碰、防跌、沿墙走、主人跟随、过门、路标导航等多种自主功能。
在国内,智能轮椅上已经取得突破性进展,上海交通大学和上海电气集团联合研制出智能轮椅样机。它的人机接口包括操纵杆、鼠标和键盘和触摸屏等,传感器系统包括视觉、声纳传感器环、红外传感器环和碰撞传感器,能够实现避障、避碰、防跌、沿墙走、主人跟随、过门、路标导航等多种自主功能 。
医学上把辅助人体、支撑体重、保持平衡和行走的工具通称为助行器[1]。普通的助行器包括拐杖、助步架,是行走困难的老人和残疾人、以及感知困难的视弱和盲人等广泛使用的行走辅助设备。这些普通助行器的功能非常简单,舒适性和安全性有限,如果是下肢完全失控或者上肢力量欠缺的瘫痪患者,则难以倚靠这些简单设备实现站立和行走,更无法帮助老年人和残疾人实现高质量的、独立生活的愿望。近年来,机器人技术,包括运动控制、传感和导航,与上述传统行走辅助设备相结合而成的助行机器人,成为国内外研究热点。助行机器人技术早在国外尤其是美国、日本、韩国等已取得了相当多的研究成果。我国虽然起步比较晚,但自从863计划将先进制造技术领域重点项目“助老/助残机器人概念样机研究与开发”作为智能机器人的关键技术开展研究以来,也已经取得了初步的成果。下面分别就助行机器人中的机构设计、辅助导航技术等研究现状做一简单综述。
机器人主要是用来支撑用户身体,辅助用户行走,并且保证行走安全性和平稳性。设计的主要目的是:满足采用人体工学的机构优化设计,材料轻型化,并且实现机构的便携性。助行机器人的底盘是整个机器人机构设计的基本机构,是安装助行机器人电机以及其他各个部件的整体支撑,它接受电机的动力,主要实现在不同路面下正常行走。底盘行走机构主要包括前轮驱动机构、后轮驱动机构 以及四轮驱动机构。
【工程设计类课题:】
明确设计具体任务,设计原始条件及主要技术指标;设计方案的形成(比较与论证);该学生的侧重点;应完成的工作量(论文、图纸、及计算机应用要求等……)
课题研究主要包括机器人通用零部件的选择与设计、机器人驱动电机的选择与使用、 机器人常用传感器的基本知识、 机器人常用元器件及集成电路的基本知识设计等。
1. 完成机器人通用零部件的选择与设计、机器人驱动电机的选择与使用、 机器人常用传感器的基本知识、 机器人常用元器件及集成电路的基本知识设计。
2. 完成外文资料翻译一份(3000单词字以上);
3. 完成毕业设计调研报告一份;(两页左右)
4. 完成毕业设计说明书一份;(30页)
5. 完成相关图纸。(两张0号图工作量)
参考文献
【1】朱世强等.机器人技术及其应用.浙江大学出版社.2001.7.
【2】平伟等.助行机器人研究发展和展望.机器人技术与应用.2009年第一期.
【3】张炜.机器人服务员sulartpal.机器人技术与应用.2007年第4期
【4】鲁涛.智能轮椅研究现状及其发展趋势.机器人技术与应用.2008年第2期.
【5】王立权等.机器人创新设计与制作.清华大学出版社。2007.
【6】万家富, 张文菲, 张占松. 网络监控系统原理与应用. 北京: 机械工业出 版社, 2003.4
【7】张伟, 张华平, 赵含东译.开发安全的应用程 序. 北京: 清华大学出版社. 2003
【8】朱世强, 王宣银. 机器人技术及其应用. 杭州: 浙江大学出版社. 2001.7
【9】宗光华,张慧慧. 机器人设计与控制.科学出版社.2004.5
【10】杨晓兰等.机械设计基础课程设计.华中科技大学出版社.2006.1
【11】吴美芳主编,机器人控制基础,北京,中国铁道出版社,1992.4. 【费仁元,张慧慧,机器人机械设计和分析,北京工业大学出版社1998.9.
【12】马香峰主编,机器人机构学,中南工业出版社,1988.8
【13】蔡自新编著,机器人原理及其应用,机械工业出版社,1988.8
【14】吴广玉,江复兴编,机器人工程导论.哈尔滨工业大学出版社.1988.8
【15】重庆大学 梁锡昌主编.机械创造方法与专利设计实例.国防工业出版社,2005.2.
【16】陈于萍,周兆元主编.互换性与测量技术基础.机械工业出版社,2005.10.
【17】朱张校主编.工程材料.清华大学出版社.2007.3.
【18】陈雪华,廖志勇,王光建.过功能教学机器人.重庆大学报.2004.
【19】朱辉,唐保宁,陈大复等编著.画法几何与工程制图.上海科学技术出版社,1982.



