
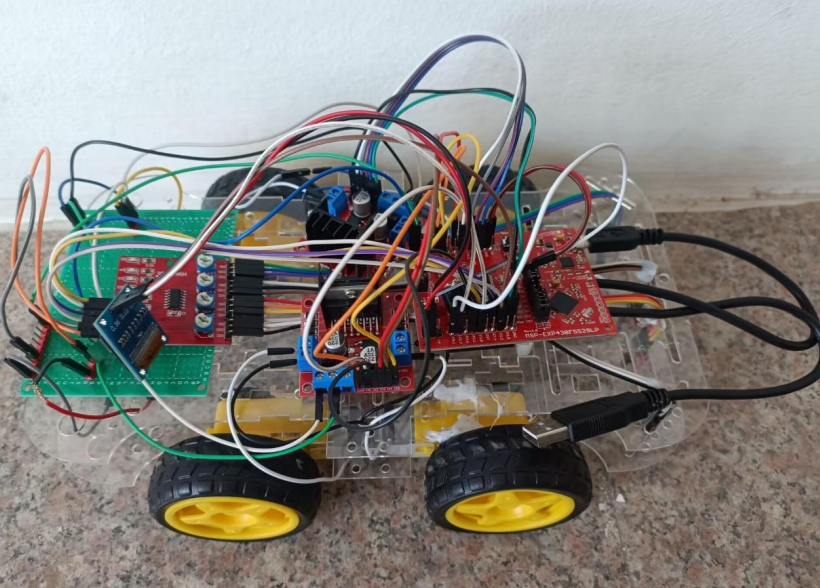




基于 MSP430 的坡道小车设计
摘要:当今世界,自动化智能化的设备已经成为发展趋势。智能小车作为当今时代最有研究意义的项
目之一,广泛应用于航空航天,工业控制,快递物流等各个领域,现已经成为科研学术界和各个高新技术
产业的重点研究方向之一。本项目研究的课题是智能小车的一个分支,是基于 MSP430 单片机的坡道小车
设计,要求小车可以独立运行,可以根据要求沿着不同角度的坡道循迹行驶,在指定位置转弯后继续行驶,
并且在指定位置停车并且,发出声音提示。小车通过该坡道的时间可以在 10 秒到 20 秒之间设定,循迹行
驶的过程中应保持匀速。主要内容包括硬件的设计与选用,软件的设计分析,以及测试结果的分析,是针
对智能小车的一次探索性研究。
关键词:智能小车 MSP430 单片机 PWM 控制 PID 算法
目录
第一章 引言.........................................................1
1.1 研究背景和研究意义...........................................1
1.2 国内外研究现状...............................................2
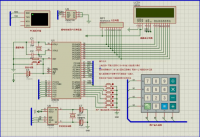
第二章 整体设计方案.................................................3
2.1 主要研究内容.................................................3
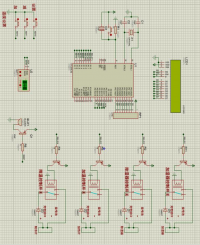
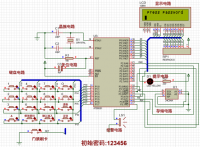
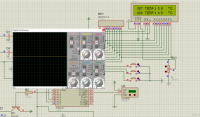
2.2 项目框图.....................................................3
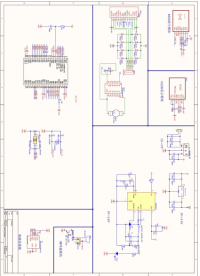
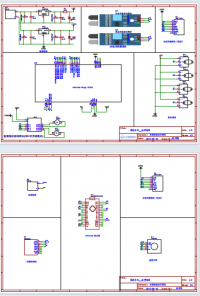
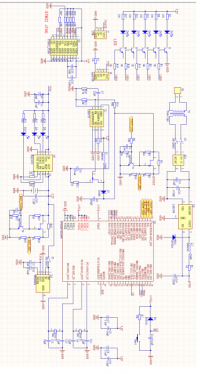
第三章 硬件电路设计.................................................4
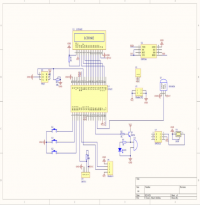
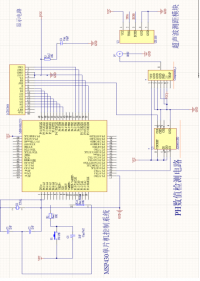
3.1 主控模块 ....................................................4
3.1.1MSP430F5529 单片机简介 ..................................4
3.1.2 开发软件介绍 ...........................................6
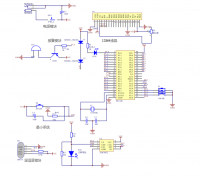
3.2 电源模块电路设计 ............................................7
3.3 检测模块 ....................................................9
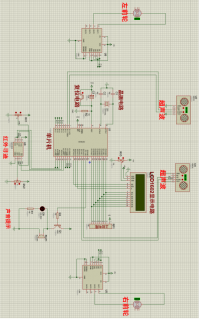
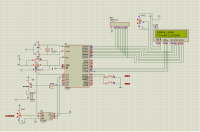
3.4 电机及电机驱动模块..........................................11
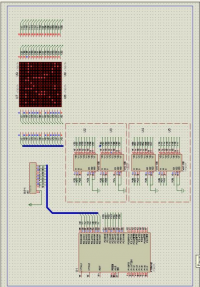
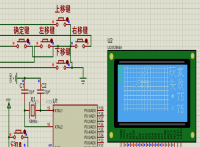
3.5 显示模块....................................................12
3.6 蜂鸣器模块..................................................13
3.7 按键模块....................................................13
第四章 软件系统分析................................................14
4.1 关键算法分析 ...............................................14
4.1.1 PID 控制算法简介 ......................................14
4.1.2 主函数及主函数流程图..................................15
4.1.3 相关子函数和模块初始化................................17
4.1.4 停车算法分析..........................................18
4.1.5 循迹算法分析..........................................18
4.2 检测函数算法分析 ...........................................20
4.3 电机控制模块算法分析 .......................................21
4.4 显示函数 ...................................................25
4.5 蜂鸣器函数 .................................................26
4.6 按键函数....................................................26
4.7 时间设定算法分析 ...........................................27
第五章 测试方案与测试结果..........................................28
5.1 测试方案....................................................28
5.2 测试结果 ...................................................28
5.3 测试结果分析 ...............................................29
第六章 总结........................................................30
6.1 项目小结 ...................................................30
6.2 未来展望 ...................................................30
致谢...............................................................31
参考文献...........................................................32
附录...............................................................33
参考文献
[1] 何武剑,邱浩峰,曲晓坤,陈迦勒,孙俊巧,余腾龙. 智能小车发展应用研究[J]. 河南
科技,2022,41(11):26-29.
[2] 唐继贤,杨扬.MSP430 超低功耗 16 位单片机开发实例[M].北京:北京航空航天大
学出版社,2014.
[3] 王然升. 自动循迹智能小车的研究与实现[D].青岛科技大学,2019.
[4] 杨楠,王恩泽. 基于 MSP430 可循迹智能小车控制系统设计[J]. 电子质
量,2021,(05):63-66.
[5] 王玉婷,陆可欣,许铭叶,陈沈力. 基于单片机的恒湿感温变色加湿器[J]. 物联网技
术,2018,8(11):70-71.
[6] 袁小唐. 开关磁阻电机转矩脉动抑制的控制策略研究[D].桂林电子科技大
学,2014.
[7] 都畋文,赫健,任广大. 基于 STM32 的抓取机器人的模块化设计[J]. 信息与电脑
(理论版),2018,(07):62-64.
[8] 李聪,尹文庆,冯学斌,张祎.基于模糊自适应 PI 控制的无刷直流电机无级调速系
统[J].机电工程,2012,29(01):49-52+73.
[9] 林粤伟.基于 ARM 和嵌入式 Linux 的智能小车技术实践[J].计算机系统应
用,2018,(8):241-246.
[10] 樊佳昊,刘芮嘉,王小利. 智能小车循迹控制算法优化与设计[J]. 电工技
术,2019,(02):25-28.
[11] 李碧月. 基于闭环控制算法和 PID 优化算法的智能小车软件系统设计[J]. 软件
工程,2016,19(09):5-10.
[12] 孙建康,王帅,曹斯萌,石秀敏. 基于模糊 PID 控制的智能循迹小车设计[J]. 现代制
造技术与装备,2021,57(12):202-205.
[13] 党婵娟. 基于 STM32 的智能环境监测小车的设计[J]. 电子技术与软件工
程,2017,(15):246.
[14] 苏宏锋,崔斌,马小杰,何洋鑫. 基于 MSP430 单片机的坡道行驶电动小车设计[J].
电子技术,2021,50(01):48-49.
[15] 杨红. 关于 2017 年全国大学生电子竞赛 M 题的设计[J]. 设备管理与维修, 2019.



