





















基于西门子S7-200PLC控制的智能循迹避障小车系统设计
摘要:智能小汽车车是机器人的一个代表。智能小机器拥有红外线传感器,中央处理器,还有就是执行原件这三项重要的部分。它还拥有许许多多的功能,比如躲避障碍,还有就是我们看动物世界中,科学家利用隐形机器人来观察小动物,这么做的好处是,可以更好的接近小动物,观察他们的一举一动,使我们更加了解小动物。 用西门子公司的PLC控制器,和其他的PLC相比,这个西门子的PLC更加紧密,速度也比较高,性能也比较高,数据处理速度也比较快,在确定车辆速度的时候。这个小车对传感器发送的指令进行查看,接受,并分析原理,然后控制两个驱动轮正反方向的转动,从而节约了经济,也可以更加稳定的运动。
关键词:智能小车;西门子PLC;高速度;高性能;避障;自动引导;自动化
Design of Intelligent Car System Based on PLC Control
Abstract:A smart car is a representative of a robot.Smart gadgets have infrared sensors, central processing units, and the three important parts of the original.It also has many functions, such as avoiding obstacles, as well as we look at the animals in the world, scientists used contact robot to observe small animals, so has the advantage, can better close to the small animals, watching their every move, make us know more about animals.Use Siemens PLC controller, compared with other PLC, the Siemens PLC closer, speed is high, has a high performance, data processing speed is fast, the vehicle speed is determined.This car for sensors to send instructions to view, accept, and analyze the principle, and then control the rotation of the two driving wheels positive and negative direction, thus saving the economy, can also more stable movement.. Keywords: Intelligent car; Siemens PLC; high speed; high performance; obstacle avoidance; automatic guidance
第一章 引言
1.1课题的背景
现在出现的智能汽车,我们决定研究智能汽车,因为这个智能车可以感觉到旁边的事物,根据这个理论,但是要阻止旁边事物,它是非常有效的高技术设备。
现在我们的社会不断的进步,科学不断进步,生产技术不断发展下,智能汽车车辆,在这个基础上发明了许许多多的不同事物,现在已经可以进入到我们的现实生活中,就像我们工业中心在网络的地位相关设备,物流信息等等,在世界上许许许多多国家人们对智能小汽车的喜爱的应用方向和动向的关注亲切,准备在这个领域发展大量的人力,财力,智能创造力,为了就是提高智能车技术的能力和有关产品的发明。智能化的机器小人的第一次的出现的时候是上个世纪,他的主要目的是到日常生活中,为人民服务,通过高科技来为人们解决许许多多日常生活,培训自己的理论、能力来发现问题,解决问题,标准化的帮助人们的生活发展促进社会的发展,和减少工作人民的主要责任。所以,为了这聪明的小汽车的研究,他的发明一直引起全国各界的关注,我们国家也非常提倡对智能交通工具的发明和创新,我们国家也非常提倡对各阶段的发展。
机智的车辆也不需要人来驾驶,机智的车辆在这种模式主动识别,自动识别控制,传感识别技术,电工电子的技术,计算机电脑和小汽车等许许多多的发明综合合的车辆能够在没有人的看护下根据我们设置的目的前进,他可以通过GPS定位系统的情况吓,自己可以主动选择最舒服路径,可以安全直接沿着该路径前进迹,在前进过程中,它可以看到障碍物,然后躲避障碍物,他还可以看的懂交通规则‘在交通规则合法情况吓,有条理的通过马路,安全的保护我们的人生安全,他还能够看到前车的位置和前车的信号,比如前车要左转,他会知道与前后车辆保持一定的安全距离。假如遇到特殊状况,比如前车发生交通事故,他可以自动减速,甚至智能小车还可以紧急制动。
这个机智能小车辆比我们现在的车辆相比有下面几点明显的优势:
1.中央处理器
我们这个机智小汽车可以感知外面的事物,然后他可以自动的采集的信息,然后他还可以分析信息,对信息进行采集、分析、识别和解决。还可以做出想紧急停止等动作; 交通规则
2.三维照像成型机器
我们这个机智小汽车可以看到周围的汽车,也可以看到车辆周围的环境,他可以看到,然后可以拍照照相,然后生成三D图像,然后传到中央处理器中,做到了集体指令。
3.激光系统和超声波系统
这个机智小汽车利用速度感应器可以感应周围车辆的行车速度,还可以通过感应器感应周围障碍物在哪,大小。这个小车的报警系统也是非常高强的,他可以在无人值守的情况下严苛的执行指令。智能汽车的最重要的功能就是使用辅助系统。如下:
这些智能传感系统可以获得其他别的车辆的行车速度,也可以看到其他车辆的装备状况。提示我们,并且发出警告,如果将要发出碰撞,它会立刻提示你,并且在十字路口,也会立刻提示你,在高速公路的岔路口会立刻提示你。警报中发出。在这种人性化的系统情况下,在驾驶员瞌睡中发出提示,提示驾驶员要系好安全带、驾驶员正确驾驶姿势。
提示你的辅助驾驶,他可以通过对外界事物的感知,为驾驶员提供一个正确性的建议,死心塌地的帮助驾驶员驾驶车辆,例如,可以帮助驾驶员精确停车。
(3)这个驾驶系统完全不需要人为来控制,比如司机长时间开车,会感觉极度疲劳,这个时候智能小车会帮助我们来接管车辆,然后就会自己开车。但是,要完成这样的效果,还需要相当大的技术支持。在更深方面下,机智的小车辆在有更深层的理解:
1.2课题研究的意义
在第一个智能小车被创出来后,我们就不停的创造出智能机器人,让这些智能机器人来代替了人类使用,从而解放了人们的劳动力。人们都喜欢偷懒,比如走路走累啦,想偷懒。从而就有人发明了车,人们不想出去说话,就有人发明了手机,手机科技可以用来信息的交流。我们这个图像采集的核心系统管和CCD,但是要根据这些智能小车辆的外部环境信息,不太清晰的图也是可以使用的,而且还可以放大,但是CCD管的面积挺大的,价格也比较贵,所以现代大多数的应用程序都有的摄像管。
感应引导线可以作为智能小车辆的重要条件,用来躲避障碍物。感知引导线在某种程度上可以是车辆的眼珠。智能小汽车的躲避障碍系统是控制原件,他可以发现障碍物,并发指令,然后躲避障碍物,还可以帮助车辆进行自动跟踪。 智能小气车辆的有三个系统分别是,中央处理器,感应器,指示系统。刚开始感应器系统会对外面的事物进行分析,规划和模拟,然后发给中央处理器,中央处理器会根据传过来的信息做出回应指令,然后发送指令到智能车辆各个部分。这个就是基本的流程。
用西门子公司的PLC控制器,和其他的PLC相比,这个西门子的PLC更加紧密,速度也比较高,性能也比较高,数据处理速度也比较快,在确定车辆速度的时候。这个小车对传感器发送的指令进行查看,接受,并分析原理,然后控制两个驱动轮正反方向的转动,从而节约了经济,也可以更加稳定的运动。
1.3国内外发展现状
从以前到现在可以分为三个阶段:
第一个阶段,大约在上个世纪,有一种叫做agv的汽车装备线,这种汽车装配线,可以直接组装工具。
第一个阶段,大约在20世纪80年代,因为计算机电脑技术发展的相当迅速,我们国家也掀起非常高的热情研究智能车辆的。在某些欧洲国家中有一个叫普修斯的工程项目,在我们生活的亚洲,有一个小日本的国家,这个小日本发明了辅助公路驾驶,后来到九十年代中后期,世界各地都在研究智能汽车,世界各地都在利用覆盖。
在第三个阶段,全国各地对智能小车辆的研究范围更大,研究系统也更全面,研究技术也比之前更加先进。比如:在美国,有一个叫的Cameron大学,机这个大学有机器人研究所,机器人研究所开发发明了十几个智能车,从这个例子可以看出,这个技术研究已经相对成熟啦。当然那是在国外,相比,我们中国研究智能汽车则比较晚,大约在20世纪90年代的时候,我们国家开始研究这个技术,不过我们技术有限。目前,我国对智能车辆研究比较单一,虽然不仅单一但还是取得了很大的成功。在我们中国科学院发展的智能汽车无人驾驶技术取得了非常大的成功。在我们中国还有一所大学也非常厉害那就是北京理工大学。1993年,我们国家发明了一个无人驾驶汽车,这对我们来说是一个非常好的消息,这个消息一出全国都被震惊。我也非常因为这个消息而感到自豪。
不久之后上交大又成功发明了出一款智能小汽车,这个小车在没有人看护的情况下,在车辆行驶过程中,他可以根据转弯的弯度,然后自动的调整方向盘,这对我们来说又是一个重大突破。
中国科学院的张教授被邀请到清华大学重点实验室合作,他们一起发明了二代智能机器人。二代智能机器人可以在各种恶劣的道路下进行行驶,并且成功的完成了预定的道路的行驶。我们国家正在投入大量的人力,物理,财力。为了就是发明更加聪明的机器人。
目 录
第1章 引言 6
1.1课题的背景 6
1.2课题研究的意义 7
1.3国内外发展现状 8
第2章 PLC编程模块的选型及设计方案 10
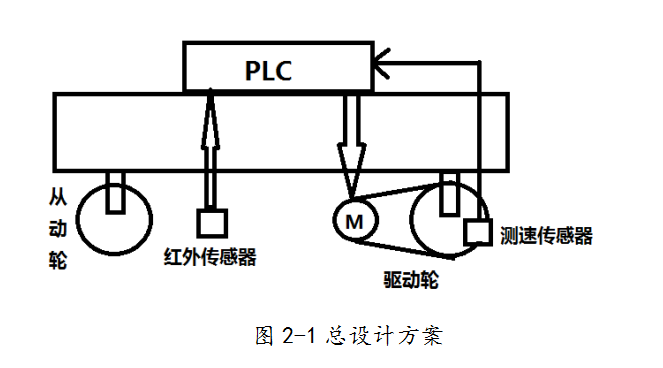
2.1系统总体设计方案 10
2.2系统硬件设计 10
2.3系统软件设计 11
第3章 控制系统的硬件设计 12
3.1西门子PLC-200的介绍 12
3.1.1 西门子PLC-200的简介和基本结构 12
3.1.2 西门子PLC-200的基本工作原理和特点 13
3.2控制系统硬件设计 15
3.2.1系统的I/O分配表 15
3.2.2系统的PLC的选择 15
3.2.3 PLC的I/O外部接线图 16
3.3电机驱动电路设计 17
3.3.1系统的电机的选择 17
3.3.2系统的电机的设计 18
3.3 传感器的设计 18
3.3.1 寻迹电路设计 18
3.3.2测速传感器电路设计 19
3.3.3避障电路设计 20
3.4 蜂鸣器电路设计 20
第4章 系统软件设计 21
4.1主程序流程图 21
4.2 寻迹小车的基本动作 21
4.3 寻迹小车的软件设计 22
4.4 寻迹小车的PLC程序分析 22
4.5 PWM电机调速程序设计 24
第5章 测试与调试 25
5.1 硬件调试 25
5.2 软件测试 26
第6章结论 27
参考文献 28
参考文献
1 廖常出 . PLC 编程及应用[M]. 北京: 机械工业出版社,2008.
2 张利平 . 液压阀原理、 使用与维护[M]. 北京: 化学工业出版社, 2009.
3 张建中, 柳如见, 尚效周, 等 . 液压支架台自动控制系统设计[J]. 煤矿机电, 2009( 6) : 26-28.
4 黄建龙, 刘明哲, 王华 . 液压综合试验台监控系统的研究[J]. 液压与气动, 2007( 10) : 10-12.
5 沈英莹, 张为民 . 液压缸试验台的 PLC 控制[J]. 制造业自动化, 2003, 25( s1) : 200-203.
6 杨书仪, 胡燕平, 王启明 . PLC 在液压阀试验台中的应用[J]. 煤矿机电, 2006( 6) : 74-76.
7李华.教育信息化发展中的几个热点问题研究一网络信息管理[J].电化教育研究,2009(9):70-73.
8姜伟,方滨兴.基于攻防博弈模型的网络和最优主动防御[J].计算机学报,2009,32(4):817—827.
9张鸿军,张新刚.数字化校园中典型安全问题分析及防御对策[J].中国电化教育。2009(6):113—116.
10程新党,张新刚.分布式IDS动态可信度反馈调整算法[J].河南科技大学学报,2010,31(4):39-42
11 Xingang Zhang,Baoping qCang,Analysis of campus network security emergency response linkage system[C]∥Proceedings of 2010International Conference on Information Technol畦y and Industrial Engineering:World Academic Press,2010:1016—1020.
12 Xin—gang ZHANG,Yunkai ZHANG.Control strategy based on worms spread in complex network[C]∥Proceedings of the 2009 Third International Symposium on Intelligent Information Technology
毕业设计附录目录
1智能小车控制系统程序表
2智能小车控制系统原理图
3智能小车控制系统接线图
4专业翻译材料
5毕业答辩评审表
6查重报告



