




基于51单片机的双轮自平衡小车控制系统设计与实现
摘 要
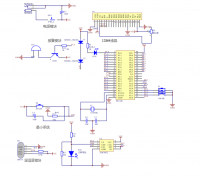
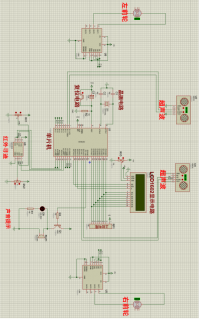
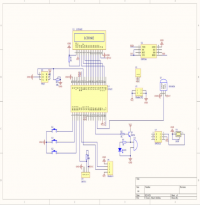
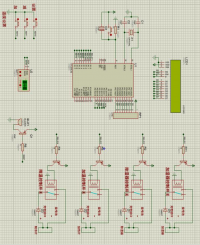
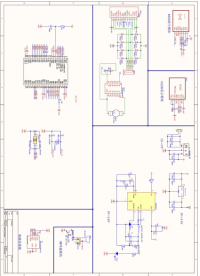
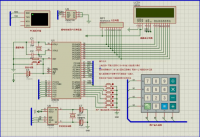
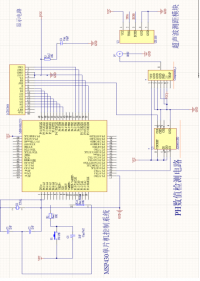
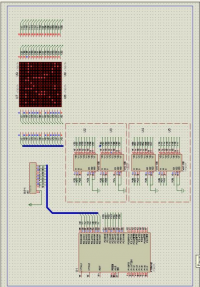
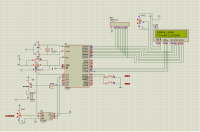
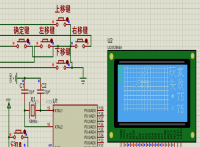
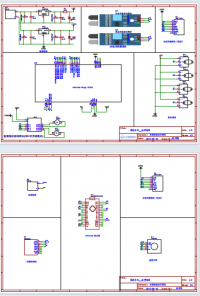
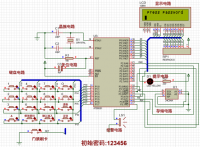
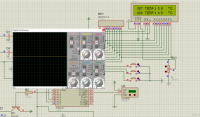
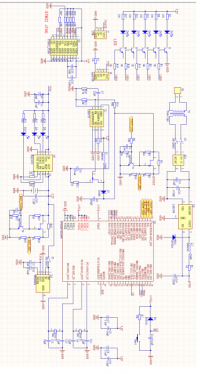
[摘 要]本文主要介绍了双轮平衡车的控制系统设计方案。采用51单片机作为核心控制器,在此基础上增加了各种接口电路板组成整个硬件系统,包括单片机最小系统,直流驱动电机控制模块,电源管理模块,测速编码模块,人机交互等模块。软件调试部分依次对应硬件各模块进行程序设计,包括A/D模块,PWM模块,ECT模块,PID控制算法,人机交互控制等。完成车模的制作和软件设计后对整个控制系统进行调试,先阐述了调试的策略,再分别就现有调试工具条件下的软件和硬件调试进行了分析,对相应的调试方法做了基本的介绍。最后根据调试情况对整个系统做了修改,基本达到设计要求。
[关键词] 双轮平衡车;51单片机;模块设计;调试策略
Abstract: This article mainly introduces the balance of the Two-wheeled balancing vehicle control system design scheme. The 51 as core controller, on the basis of interface circuit board of increasing the hardware system, including single chip minimize system, dc motor control module, power management module, code modules speed, man-machine interaction module. Software debugging session in the corresponding module design program, including A/D module, PWM module, ECT module, PID control algorithm, the man-machine interactive control, etc. Accomplish the production and the software design draw after the whole control system for debugging, first expounds the commissioning of the strategy, second,different debugging tools under the conditions of existing software and hardware debugging are analyzed, the corresponding debugging method basic introduction. According to the situation of the whole system debugging have modified, basic to meet the design requirements.
Key words: the Two-wheeled balancing vehicle; 51as MODULAR DESIGN ; Debugging strategy
目 录
1 绪论 1
1.1 课题的选题背景与意义 1
1.2 双轮自平衡车国内外发展概况 1
1.3 课题研究的主要内容 2
2 智能车系统原理分析与设计 3
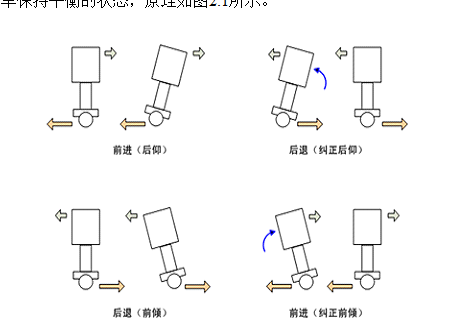
2.1 控制系统原理分析 3
2.2 控制系统总体设计方案 4
2.3 双轮自平衡车的姿态检测系统 5
2.3.1 加速度计 6
2.3.2 陀螺仪 6
2.3.3 卡尔曼滤波 7
3 自平衡车系统硬件电路设计 9
3.1 51单片机单片机介绍 9
3.2 51单片机单片机最小系统电路设计 11
3.3 电机驱动模块电路设计 12
3.3.1 驱动芯片介绍 13
3.3.2 驱动电路设计 13
3.4 电源管理模块电路设计 13
3.4.1 电源的分类 14
3.4.2 双轮自平衡车电源电路设计 14
3.5 倾角传感器电路设计 15
3.5.1 加速度计电路设计 15
3.5.2 陀螺仪放大电路设计 15
3.6 速度测量模块设计 16
3.7 辅助调试电路设计 17
4 自平衡车系统软件设计 19
4.1 系统软件总体结构 19
4.2 基于PID算法的实现 20
4.2.1 PID分类 20
4.2.2 比例积分微分各部分介绍 20
4.2.3 PID参数的整定 21
4.3 双轮自平衡车直立模块软件设计 22
4.4 双轮自平衡车速度控制模块软件设计 22
4.5 电机转速的控制 24
5 自平衡车系统的安装与调试 27
5.1 小车整体结构的安装 27
5.1.1 速度传感器的安装 28
5.1.2 倾角传感器和陀螺仪的安装 28
5.2 系统的调试工具 29
5.3 自平衡车系统的硬件调试 30
5.3.1 加速度计和陀螺仪的调试 30
5.3.2 电机驱动模块的调试 30
5.3.3 速度编码器的调试 31
5.4 自平衡车系统的静态调试 31
5.5 自平衡车系统的动态调试 31
6 总结与展望 33
6.1 总结 33
6.2 展望 33
致 谢 34
参考文献 35
1 绪论
1.1 课题的选题背景与意义
近些年来随着我国科学技术的飞速进步,自动化技术也随之越来越普及,深入到人们的生活中,双轮自平衡小车便是一种高新技术的集成体。双轮自平衡小车是一个归纳着电子技术、机械、计算机等多门技术部分的高新技术手段,随着各有关领域范畴的飞快进步,它不单单拥有理论科学上的研究意义,甚至是代表着一个国家的综合科学实力。现代的工业汽车虽然相对的给人们带来了便利,但是也带来了交通拥堵,与大气污染方面的环境问题。与此同时,双轮自平衡小车利用自身电能来运行,并且体积轻小,运行自由,如果将此项技术广泛应用到生活中,势必会极大的减轻交通负担,缓解人们的出行压力,同时也能起到保护环境,降低能源消耗的作用。双轮自平衡智能小车是可以进行行为控制、环境检测、执行任务的综合控制系统,应用范围也越来越广泛,随着技术的发展,机器人也会代替人类做一些不能代替的任务,在未来如果把双轮自平衡小车技术和传感器、GPS导航等设备组合在一起,使各自功能相互协调工作,应该会具有更广泛的应用前景,为人们的生活带来便利。
1.2 双轮自平衡车国内外发展概况
双轮自平衡小车技术近几年得到了快速的发展,国内外的相关专家与技术人员均为之付出了巨大的努力,研究成果也为科学的发展做出了相应的贡献。国外方面科研成果主要有瑞士联邦工业大学电子实验室的Felix Grasser等人设计出利用DSP控制方法,可以进行远程操控的双轮智能移动机器人Joe,它超越了人类步行的速度,并能自主保持稳定。同时还有Segway LLC开发了赛格威两轮自平衡机器人,本身使用的工作原理的动态的稳定性,通过车辆本身的自动平衡能力,来达到平衡稳定与行走。这其中最为先进的是,由谷歌的工程师塞巴斯蒂安还有他的团队共同设计制作出的,谷歌版的无人驾驶车。此项新型智能车,通过自身装备的激光雷达、车载相机还有激光测距仪,借用这些技术来观察周围交通车辆的行驶状况,并根据自身带有的车载地图来完成汽车的行驶,为人们的交通出行提供了便利。该项技术最重要的研究成果,便是为未来无人驾驶的车辆研究做出了其重大的贡献,如何来提高运行质量以及降低事故发生率是要面对的棘手问题与挑战。
参考文献
孙同景 陈桂友 Freescale 9S12十六位单片机原理及嵌入式开发技术.机械工业出版社.2010
张阳 滕勤 MC9S12XS单片机原理及嵌入式系统开发.电子工业出版社.2011
蔡述庭 “飞思卡尔”杯智能汽车竞赛设计与实践—基于S12XS和KinetisK10.北京航空航天大学出版社.2010
梅晓榕 自动控制元件及线路.哈尔滨工业大学出版社.2004
张琛 直流无刷电机原理及应用.机械工业出版社.2009
刘金琨 智能控制.电子工业出版社.2005
尔桂花 运动控制系统.清华大学出版社.2002
陈伯时 电力拖动自动控系统:运动控制系统(第四版).机械工业出版社.2009
陈万忠 MC9S12单片机原理嵌入式应用开发技术.机械工业出版社.2012
[10] 薛涛 单片机与嵌入式系统开发方法.清华大学出版社.2009
[11] 王兆安 刘进军 电力电子技术.机械工业出版社.2009
[12] Baber.J, Kolodko.J,Noel.T,Cooperative autonomous Driving:Intelligent Vhicles
Sharing City roads. IEEE Robotics&Automation Magazine. 2005
[13] 康波 李云霞 计算机控制系统.电子工业出版社.2011
[14] 杨素行 模拟电子技术.高等教育出版社.2006
[15] HUANGB SHAHSL.Performance Assessment of ControlLoops: Theory and
Applications . London: Springer2 Verlag. 1999
[16] 安鹏 S12单片机模块应用及程序调试.电子产品世界.2006
http://www.bysj1.com/html/4117.html http://www.bysj1.com/ http://www.bysj1.com/html/2518.html http://www.caddown.bysj1.com/



