





















基于AT89S52的智能遥控小车系统的设计与仿真
一、选题简介、意义
自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的只能水平不断提高,并且迅速的改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器人一直是人类的梦想。
该智能小车可以作为机器人的典型代表。它可以分为三大组成部分:传感器检测部分、执行部分、CPU。机器人要实现自动避障功能,还可以扩展循迹等功能,感知引导线和障碍物。可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。基于上述要求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗滤感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器来充当。智能小车的执行部分,是由直流电机来充当的,主要控制小车的行进方向和速度。单片机驱动直流电机一般有两种方案: 第一,勿需占用单片机资源,直接选择有PWM功能的单片机,这样可以实现精确调速;第二,可以由软件模拟PWM输出调制,需要占用单片机资源,难以精确调速,但单片机型号的选择余地较大。考虑到实际情况,本文选择第二种方案。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
该设计是基于红外遥控技术而确定的设计类课题。以单片机为核心来控制小车,要求利用红外线遥控器来控制小车的运行方向和速度。其中小车驱动由L298N驱动电路完成,由于电机驱动使用性能优良的L298N芯片,使得电机运行速度稳定。电机采用容易控制的直流电机,通过测试小车能检测多种不同轨迹路线且运行稳定,实用性强。速度由单片机输出的PWM波控制。整个系统电路结构简单,可靠性高。实验测试结果满足要求。
预期目标:
(1)红外遥控功能,启停、自动或手动;
(2)小车能够前或后直线行进;
(3)小车能够沿着任意曲线(标定线)行进;
(4)小车具有测距避障功能,在行进过程中能够检测前后方障碍物的距离并避免与障碍物接触;
(5)具有行车记录功能,显示行进距离;
(6)LED指示、蜂鸣报警电功能。
2.确定控制方案,绘制硬件电路图。
3.进行小车系统的软件编程。
4.Protues仿真软件对整个系统进行软硬件联调。
三、设计(论文)体系、结构(大纲)
1.1智能小车的意义和作用
1.2AT89S52单片机
2.设计要求和原理分
2.1设计任务
2.2设计要求
3.系统硬件设计
4.系统软件设计
4.1系统软件流程框图
5.系统测试
5.1系统硬件测试
5.2系统软件测试
5.3系统测试结果分析
6.总结
一、选题简介、意义
自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的只能水平不断提高,并且迅速的改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器人一直是人类的梦想。
该智能小车可以作为机器人的典型代表。它可以分为三大组成部分:传感器检测部分、执行部分、CPU。机器人要实现自动避障功能,还可以扩展循迹等功能,感知引导线和障碍物。可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。基于上述要求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗滤感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器来充当。智能小车的执行部分,是由直流电机来充当的,主要控制小车的行进方向和速度。单片机驱动直流电机一般有两种方案: 第一,勿需占用单片机资源,直接选择有PWM功能的单片机,这样可以实现精确调速;第二,可以由软件模拟PWM输出调制,需要占用单片机资源,难以精确调速,但单片机型号的选择余地较大。考虑到实际情况,本文选择第二种方案。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
该设计是基于红外遥控技术而确定的设计类课题。以单片机为核心来控制小车,要求利用红外线遥控器来控制小车的运行方向和速度。其中小车驱动由L298N驱动电路完成,由于电机驱动使用性能优良的L298N芯片,使得电机运行速度稳定。电机采用容易控制的直流电机,通过测试小车能检测多种不同轨迹路线且运行稳定,实用性强。速度由单片机输出的PWM波控制。整个系统电路结构简单,可靠性高。实验测试结果满足要求。
目录
第一章 绪论
1.1概述--------------------------------------------------------------1
1.2 设计要求及主要功能介绍-------------------------------------------------------------1
1.2.1 手动控制功能--------------------------------------------------------------1
1.2.2 行车记录功能--------------------------------------------------------------1
1.2.3 超声避障功能--------------------------------------------------------------1
第二章 系统总体设计
2.1 系统功能模块的划分--------------------------------------------------------------3
2.2 单片机数目的选定--------------------------------------------------------------3
2.3 系统原理框图--------------------------------------------------------------3
2.4系统软件主要特色--------------------------------------------------------------4
2.4.1软件分层结构--------------------------------------------------------------4
2.4.2多任务结构--------------------------------------------------------------8
第三章 硬件模块设计
3.1 红外遥控模块设计-------------------------------------------------------------10
3.2 显示模块设计--------------------------------------------------------------12
3.2.1 多位数码管扫描显示原理-----------------------------12
3.2.2 工作状态指示灯及转向灯的设计-------------------------13
3.2.3 显示模块原理图------------------------------------------13
3.2.4 显示任务的软件设计--------------------------------------14
3.3 声音提示功能的设计-------------------------------------------14
3.4 前轮转向模块的设计-----------------------------------------------15
3.4.1 前轮转向的机械结构------------------------------------------15
3.4.2 步进电机驱动芯片------------------------------------------15
3.4.3 前轮转向任务的软件设计------------------------------------15
3.5 后轮驱动模块的设计------------------------------------------16
3.5.1 直流电机驱动模块L298N------------------------------------16
3.6 超声测距模块-------------------------------------------------------------17
3.6.1 超声测距的理论依据------------------------------------------17
3.6.2 超声发射电路------------------------------------------17
3.6.3 超声接收电路------------------------------------------17
3.7 双机串行通信模块的软件设计------------------------------------------18
3.7.1 通信方式的选型------------------------------------------18
3.8 系统硬件总图 ------------------------------------------18
第四章 系统软件设计
4.1单片机的C语言程序设计简介-------------------------19
4.2 系统的两种工作模式---------------------------------------19
4.3 手动模式的设计------------------------------------------19
4.4 自动模式的设计------------------------------------------20
4.5系统设计总程序------------------------------------------21
第五章 系统组装及调试
5.1 系统的组装、调试------------------------------------------23
致谢-------------------------------------------------------27
参考文献---------------------------------------------28
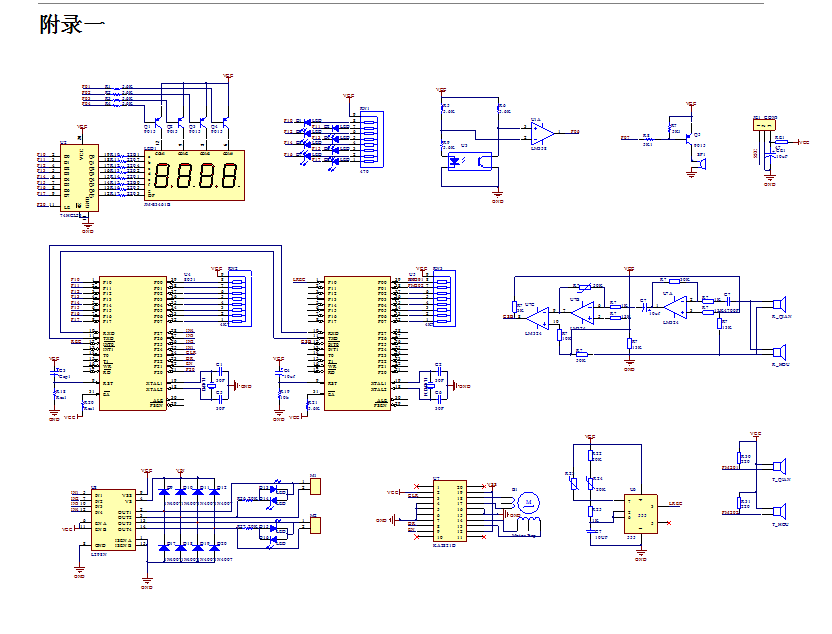
附录一 系统硬件原理图----------------------------------------29
附录二 程序清单------------------------------------------30
预期目标:
(1)红外遥控功能,启停、自动或手动;
(2)小车能够前或后直线行进;
(3)小车能够沿着任意曲线(标定线)行进;
(4)小车具有测距避障功能,在行进过程中能够检测前后方障碍物的距离并避免与障碍物接触;
(5)具有行车记录功能,显示行进距离;
(6)LED指示、蜂鸣报警电功能。
2.确定控制方案,绘制硬件电路图。
3.进行小车系统的软件编程。
4.Protues仿真软件对整个系统进行软硬件联调。
三、设计(论文)体系、结构(大纲)
1.1智能小车的意义和作用
1.2AT89S52单片机
2.设计要求和原理分
2.1设计任务
2.2设计要求
3.系统硬件设计
4.系统软件设计
4.1系统软件流程框图
5.系统测试
5.1系统硬件测试
5.2系统软件测试
5.3系统测试结果分析
6.总结
参考文献
[1]马忠梅,籍顺心,等.单片机的C语言应用程序设计[M].北京:北京航空航天大学出版社,2004:1-187.
[2]陈明计,周立功,等.嵌入式实时操作系统Small RTOS51原理及应用[M].北京:北京航空航天大学出版社,2004:12-22,216-249.
[3]阎石.数字电子技术基础[M].北京:高等教育出版社,1998:348-352.
[4]谢红.模拟电子技术[M].哈尔滨:哈尔滨工程大学出版社,2001:150-162,220-236,268-276.
[5]曹伟华. 一款遥控车的电路剖析[DB].
http://www.21xr.bysj1.com/rf315.bysj1.com/0/0/178.html, 2004-09-24/2005-3-20.
[6]徐铭泽,武明西,范展.遥控启停电动车[Z].哈尔滨:哈尔滨工程大学,2004.
[7]路锦正,王建勤,等. 超声波测距仪的设计[J]. 传感器技术,2002,21(8):29-34.
[8]肖景和, 赵健. 红外线、热释电与超声波遥控电路[M]. 北京:人民邮电出版社,2003.
[9]付家才. 单片机控制工程实践技术[M]. :北京:化学工业出版社,2004.
[10]孙辉,张涛,张旭东.快学易用Protel99[M].北京:北京邮电大学出版社,2001.
[11]孙燕,刘二明,等.Protel99设计与实例[M].北京:机械工业出版社,2000.




