





















智能AGV小车PLC控制系统的设计
摘要:AGV小车,是通过PLC控制、沿规定的导引路径行驶、具有安全保护以及各种移载功能的运输车。寻迹传感器通过控制左右两个伺服电机的运转速度使车体前端重新回到地面标识的中心,寻迹传感器上的光源在接通电源后会发出光束照射地面,传感器会接受地面与标志物的反射光来判断小车是否行驶在预设的路径上。定位传感器是用来检测小车是否到达目的地的仪器。一个AGV小车上拥有两个八位寻迹传感器和四个四位定位传感器,在小车车头与车尾的下方正中间各装有一个寻迹传感器和两个定位传感器。
关键词:寻迹传感器;步进电机;信捷PLC;定位传感器;触摸屏;扩展模块
Design of PLC control system for intelligent AGV trolley
Abstract:AGV car is controlled by PLC, along the prescribed guide path, with safety protection and various transfer function of the transport vehicle. The tracking sensor returns the front end of the vehicle body to the center of the ground mark by controlling the running speeds of the left servo motor and the right servo motor, the light source on the tracking sensor emits light beams to irradiate the ground after the power supply is switched on, and the sensor receives the reflected light of the ground and the mark to judge whether the vehicle runs on a preset path or not. A positioning sensor is an instrument used to detect whether the cart has reached its destination. An AGV trolley has two eight-position tracking sensors and four four-position positioning sensors, and a tracking sensor and two positioning sensors are respectively arranged between the front of the trolley and the lower square of the rear of the trolley.
Keywords:Tracking sensor, step motor,XC PLC,position sensor,touch screen,extended module
智能AGV小车PLC控制系统的设计
第1章 绪论
1.1?AGV概述?
1.1.1 AGV的概述?
根据美国物流协会定义,AGV是指装备有电磁或光学导引装置,能够按照规定的导引路线行驶,具有小车运行和停车装置、安全保护装置以及具有各种移载功能的运输小车。
?1.1.2 AGV小车的背景和意义
21世纪到来后,社会进入高速发展,制造业也同样进入一个新阶段,企业的主导模式渐渐的转变为敏捷制造模式,企业能否赢得竞争的主要手段是能否开发出新产品,开发出适应社会需求的新产品和数量。机器人的作用很大,具有自主规划、可编程、可调节作业和基于传感器控制等特点,它是自动系统的重要组成部分,为传统制造企业向敏捷制造企业转型提供重要的技术支持。自动导向小车是移动机器人的一种,是现代制造企业物流系统中的重要设备,主要用来储运各种物料,大大的缩减了人力,将工作效率提高了一大截。
随着工业快速的发展,自动控制生产技术已在轻重制造业中运用。生产运输线是自动控制生产技术中重要的一个环节,利用自动化控制技术实现高效的生产效率,这要求了生产运输线能够可靠、及时的将生产线上的物料运输到指定的位置。
在这三年中有许多专业课程需要去学习,有《工厂电气控制设备》、《PLC应用技术》、《组态技术及应用》和《机械零部件的分析与拆装》等。综合所学的知识和实际运用,选的课题是“智能AGV小车的控制部分设计”,该课题贴合实际,因为现在的大部分企业都是采用自动化控制,自动化技术不仅可以把人在繁重的体力劳动和危险的工作环境中解放出来,而且极大地提高了企业的劳动生产率。
通过此次毕业设计,会进一步提高自己的工程实践能力。毕竟自己独自一人完成此次课题是有难度的,在完成该课题的期间,肯定会遇到各方面的问题,问题就是用来解决的,得把在学校所学到的知识充分的利用起来,来检验自己在课堂所学的知识是不是很好的掌握。本课题的完成,将为我们以后的工作积累很大的经验,也会提升我们不少的自信心。
1.2??AGV国内外研究现状?
1.2.1 国外发展现状??
世界上第一台AGV是由美国Barrett电子公司于20世纪50年代初开发成功的,它是牵引式小车系统,能够非常轻易地与其他物流系统自动连接,十分明显地提高了劳动生产效率,极大地提高了装卸搬运的自动化程度。?
1.2.2 国内发展现状?
我国AGV发展历程较短,但各大企业不断加大在这一领域的投入,以改变我国AGV长期依赖进口的局面。
在国内AGV的技术来源有两种模式:一种是引进技术;一种是自有知识产权的技术。两种模式目前都涵盖AGV的所有技术,技术水平并无多大差别。如今,国内大部分制造业与运输行业都在使用AGV,这不仅节约了大量的人工成本,而且可以获得更加可观的经济效益,是我国社会快速发展并渐渐成熟的一个标志。
1.3??AGV的应用范围
AGV的应用场合很广泛,是一个典型的机电一体化多技术多学科的集成系统。随着电子和控制技术的发展,AGV的技术也在不断地进步,朝着性能更优越、更廉价、自由度更高、超大型化和微型化方向发展,其应用领域也在不断扩展,并且取得了很好的效果。一般来说,AGV的主要应用范围有如下几个方面:?
1.3.1 物料搬运?
在现代物料搬运中,当人工总成本与使用AGV小车的成本基本相当时,AGV的市场接受就会很快形成,毕竟人和机器相比在很多方面都有所不如。
1.3.2 柔性装配线,加工线?
?AGV出现之后,不仅作为无人自动搬运车辆使用,也可当作是一个个可移动的装配台、加工台使用,他们既能自由独立地分开作业,又能准确有序地组合衔接,形成没有物理隔断,却能起动态调节作用,高度柔性的生产线。如轿车总装线,发动机装配线,试车线,机床加工线,家电生产线等。??
1.3.3 特殊场合用?
AGV无人自动搬运优势,解决了一些不适宜人在其中生产或工作的特殊环境问题。如核材料、危险品(农药、有毒物品、腐蚀性物品、生物物品、易燃易爆物品)等。
1.4??AGV的发展趋势分析?
1.4.1 ?AGV的技术水平将日益提高?
现代AGV技术的最显著特征是具有智能化。车载计算机的硬软件技术日益强大,使AGV具有从外部信号接受装置接收调度中心或客户发出的指令,实现自动导引,自动作业,运行管理,车辆调度,安全避碰等功能,实现了AGV的智能化、信息化、柔性化、敏捷化、节能化、绿色化等。现代AGV小车是24小时不断运作的车辆(仅在任务间隙时随机进行短时充电),它能主动、有序的按最合理、快捷的路线执行作业。??
1.4.2 ?AGV的综合技术将逐步机器人化?
AGV本身就是一种移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、机械工程、电子工程、计算机工程、自动化控制工程以及人工只能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。?
由于AGV的机器人化,现代AGV已不仅仅是一种沿固定路径行驶的搬运工具,几乎可以适合于各种固定的或不固定的运输场所。?
1.4.3 ?AGV的应用将日益普遍?
由于现代化生产观念日益受到重视,对生产线运行、物流系统的柔性要求越来越高。在多种产品混合生产线运行、提高产量、重新组合生产线等方面,AGV必将得到迅速发展和普及应用,这不仅符合了现代化工业迅速发展的需要,而且是由AGV本身所独具的优越性决定的。??
随着工业自动化的发展,国内的需求越来越强烈,已经有超过千台的AGV产品在使用,而且市场在逐步扩大。?
目录
第1章 绪论 2
1.1 AGV概述? 2
1.2 AGV国内外研究现状? 2
1.3 AGV的应用范围 3
1.4 AGV的发展趋势分析 3
第2章 总体方案设计 5
2.1 设计方案概述 5
2.2 传感器部分设计 6
2.3 驱动部分设计 6
2.4 控制部分设计 7
第3章 智能AGV小车控制系统的硬件设计 9
3.1 硬件选型 9
3.2 I/O点的分配 11
3.3 硬件接线图 12
第4章 程序设计 14
4.1程序编写流程图 14
4.2 通电运行准备 14
4.3 前进启动 15
4.4 后退启动 21
4.5 断电刹车 26
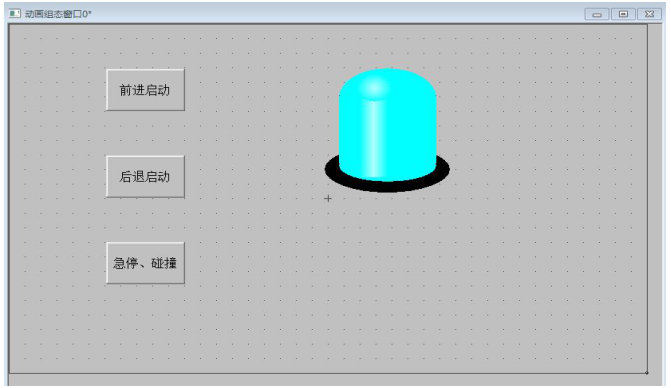
4.6 触摸屏设计 27
第5章 调试运行 29
第6章 致谢 30
参考文献 31参考文献
[1] 泮玉松. PLC优化I/O点的常规方法探讨[J]. 《国内外机电一体化术》.2005:46-47
[2] 沈颖. 激光导引AGV车载控制系统研究.《合肥工业大学硕士论文》. 2007-05-01
[3] 王勇. AGV适用性综述.《物流科技》. 2008-11-10
[4] 张辰贝西,黄志球. 自动导航车(AGV)发展综述.《中国制造业信息化》.2010-01-01
[5] 江正川. AGV控制系统设计及导航算法研究.《青岛科技大学硕士论文》. 2014-05-01
[6] 闫峻. 基于PLC和ZIGBEE无线通讯的AGV自行车设计. 《数字技术与应用》. 2014-12-15
[7] 宋黎菁. 基于S7-1215C PLC和视觉系统的工业机器人分拣系统的应用.《柳州职业技术学院学报》. 2015-12-15
[8] 刘宝志. 步进电机的精确控制方法研究.《山东大学硕士论文》. 2010-04-05
[9] 曹志洪. 基于触摸屏的可焊性测试仪控制系统的研制.《华南理工大学硕士论文》. 2013-09-01



