




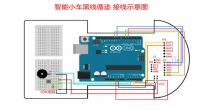



基于Arduino的平衡小车设计
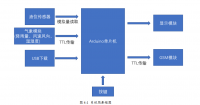
摘要:最近几年,我们可以看到社会各界对两轮自平衡小车的关注度,随着它的深入研究和应用方面的扩展,我们可以预见它在未来发展的潜力巨大。本人通过对市场上已经存在的自平衡小车的调查和研究给出一种功能型两轮平衡小车的设计方案,它在内部采用6轴传感器MPU-6050构成小车的姿态检测装置,使用卡尔曼滤波完成陀螺仪的数据处理。系统采用开源硬件平台Arduino UNO R3为控制核心,完成对传感器信号的处理,滤波算法的实现以及车身的控制等。
整个小车系统完成以后,各个模块可以正常并协同工作,不但可以在没有外干扰的情况下小车可以实现自主平衡,而且可以在外界的适量干扰下能够自主调整并且迅速的恢复稳定状态。同时,该车还可以实现前进、后退、左转、右转等基本动作。
关键词:平衡车;Arduino;MPU-6050;姿态检测
Balanced Car Based on Arduino
Abstract: In recent years, we can see that the community self-balancing robot's attention, with the expansion of its in-depth study and application, we can foresee its huge potential for future development. I am already on the market by the presence of a self-balanced vehicle surveys and studies to give a functional two balanced car design, it is the internal use of the posture detecting device MPU-6050 6-axis sensor constituted car, using a Kalman filter complete gyroscope data processing. The system uses open-source hardware platform Arduino UNO R3 as the control center, complete sensor signal processing and filtering algorithms to achieve body control.
After the completion of the entire car system, each module can be properly and work together, not only can the car can achieve independent balance without outside interference, but also be able to customize the appropriate amount of adjustment in the external interference and quickly restore a stable state. At the same time, the car can also be achieved forward, backward, turn left, turn right and other basic movements.
Keywords: two-wheeled self balancing, gyroscopic gesture detection, Kalman filter data fusion.
第一章 绪论
1.1研究背景与意义
这几年来,伴随电子技术的发展和进步,移动机器人研究的不断深入,已经成为目前最活跃的研究领域之一,移动机器人的应用范围越来越广泛,而环境和任务已越来越复杂,这就要求移动机器人必须能够适应复杂的环境和任务。例如,室外移动机器人需要在不平的地面上行走,有时会允许机器人在局部环境下运行,这样就可以使机器人在地面上行走。
在这样的背景之下提出了自平衡机器人的概念,其机器人与其他移动机器人不同的最显著特点是:采用双同轴独立驱动,将车身定位在中心轮轴上,车轮向前和向后移动,以保持身体平衡,并能以直立平衡的方式运作。自平衡机器人的横空出世以来,受到了全世界爱好机器人学者的关注,除了这机器人外形结构的独特,更主要的是由于其自身的不稳定性质,使得它有很好的研究价值。
在1987年初,日本电信大学教授喀左市提出一二轮自平衡机器人的概念。当时他最初的思想是用一个数字处理器来检测平衡变化。在本世纪初,瑞士联邦技术研究所,乔在研究两轮自平衡机器人出来后,世界越来越多的国家开始关注两轮自平衡机器人。美国发明家Dean Kamen和他的DEKA研发公司开发的可以用于两轮自平衡车以Segway载人命名,随即进入市场。自车有一二个轮子的自我平衡灵活性并受到当时社会的广泛使用,例目前的汽车已经在奥运会和世界博览会等大型场合使用。
今天,只有以市场为导向的两轮自平衡电动车,自2002上市就备受关注。他们观察人体行走的姿势和特点,认识到其实人是能够顺利行走的,因为身体是敏感的平衡器官,可以准确地确定身体重心的变化量,通过小脑的直接反应,然后用腿部肌肉做出力来平衡眼前的倾倒趋势。因此,当人体向前,这种不自觉的反应,这将导致人类伸出一个脚来保持身体的平衡,所以通过这向前,向前踏步的操作周期,构成一个“走”这一行动。所以他们试图用精密陀螺仪代替人类的平衡器官,并不是脚电动机与车轮,追求所谓的“动态稳定发展”。
1.2课题研究的内容
本文提出了一种自平衡车研究机构的检测和加速度传感器的互补性及滤波算法的特点和比较,包括卡尔曼滤波和其他常用的互补滤波算法。算法实现与直流电机的速度控制。这些措施包括:
(1)机器人机构的设计:包括机械、调焦、电气系统的设计,为进一步研究提供一个良好的平台;
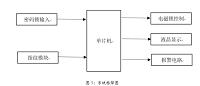
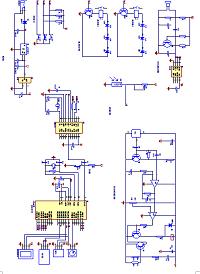
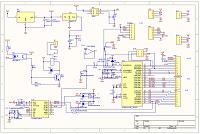
(2)信号调理和控制部分的电路设计:陀螺输出信号需要进行进一步的滤波和放大,因此需要设计信号调理电路,同时需要建立相关的输入和输出模块来控制核心装置,因此需要我们对主单元电路进行设计。还需设计直流电机驱动电路。
(3)基于卡尔曼滤波的数据融合:当陀螺测量角速度在很短的时间,只有加速度传感器的噪声本身是非常严重的,所以他们需要互补,根据卡尔曼滤波器的设计获得准确稳定的角速度。
(4)控制算法包括:双向闭环控制和闭环控制的小车倾斜闭环直流电机速度控制。
第二章 总体方案的设计与分析
2.1阐述与分析
根据该方案的要求,在外界的干预下小车能够依靠车轮平衡能够完成向前后,左右转弯等动作。分析表明,该系统的要求是保持小车两轮能够平衡运动,两轮由直流电动机运行。因此,从一个控制点的角度看,该车可以作为一个控制对象,控制输入的旋转
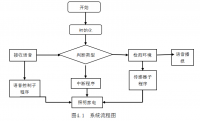
速度。整个控制系统分为三个子系统:
(1)小车平衡控制:通过操纵小车倒车和控制平衡。
(2)小车速度控制:在平衡的基础上,通过调整小车与地面倾斜度来控制速度。
(3)小车方向控制:通过控制转向系统的不同实现电极之间的旋转速度。
小车的直立控制由2个后轮驱动来直接完成,并且速度是通过调节小车与地面的倾斜度从而达到变速。
三个子系统独立控制。因此在同一个对象(小车)之下,会有不同的子系统之间的控制。为了达到分析的目的,假设控制小车的平衡和方向,小车还是不能正常运行;同样,当小车速度控制,也需要控制小车速度和方向。同时满足这三个条件,小车才得以保持平衡。为了避免小车速度的影响,小车要求在倾斜变化非常小的情况下前行。其中,平衡控制是系统最基本的要求,也是整个控制系统的难点。
人体具有丰富的感觉器官,通过调节大脑可以控制腰部和腿部肌肉,使身体保持直立。普通人只要通过练习就可以是你的手指一直的不落,这就需要2个条件:一个是保持手指可以自由移动,另一个是人的眼睛要观察到手指倾斜角度和角速度。这2个条件是必不可少的,实际上,这是一个负反馈机制的控制系统。由于小车的平衡是由一个负反馈控制实现的,而在手持的指尖保持着垂直是相对简单的。由于小车只能靠两轮接触地面,车轮和地面都会发生摩擦,所以车是倾斜的相对滚动。检测出了小车在倾斜状态下的控制系统,该控制器控制车轮的旋转,在一定维度的倾斜条件下可以保持小车的平衡。
2.2对小车运行进行建模
在运行过程中,没有考虑转向的情况,基本上沿着一个固定的轴直线运动,所以平衡车的运动可以理解为垂直运动的二维平面,运动组成的基本形式包含身体前后运动与身体本身是直径为2个工作状态旋转运动轴,并有一个密切耦合操作。因此,从动力学的角度出发,对小车的平衡性进行定量分析,我们需要平衡小车的基本特性,对研究问题进行合理的假设。
一、选题简介、意义
最近几年,我们可以看到社会各界对两轮自平衡小车的关注度,随着它的深入研究和应用方面的扩展,我们可以预见它在未来发展的潜力巨大。本人通过对市场上已经存在的自平衡小车的调查和研究给出一种功能型两轮平衡小车的设计方案,它在内部采用6轴传感器MPU-6050构成小车的姿态检测装置,使用卡尔曼滤波完成陀螺仪的数据处理。系统采用开源硬件平台Arduino UNO R3为控制核心,完成对传感器信号的处理,滤波算法的实现以及车身的控制等。
整个小车系统完成以后,各个模块可以正常并协同工作,不但可以在没有外干扰的情况下小车可以实现自主平衡,而且可以在外界的适量干扰下能够自主调整并且迅速的恢复稳定状态。同时,该车还可以实现前进、后退、左转、右转等基本动作。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
本文提出了一种两轮自平衡车的设计方案。以姿态传感器(陀螺仪、加速度计)来监测车身所处的俯仰状态和状态变化率,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合,通过高速中 央处理器计算出适当数据和指令后,驱动电动机产生前进或后退的加速度来达到车体前后平衡的效果。实验结果表明:小车自行保持直立,并且具有较好的回复平衡 能力。
研究的主要内容
1控制器:arduino uno
2传感器:角加速度用BMA 180,角速度用 ITC 3205,位移用电机12线正交编码器
3算法:角度测量用卡尔曼滤波融合,控制用全状态反馈
4动力:两个直流减速电机,电压12v 功率17w速比64速度120rpm。MC33886驱动。4S锂电池组
5:无线通讯:3个XBEE无线模块分别在小车,Wii手柄遥控模块,PC检测模块。
预计可能遇到的困难,提出解决问题的方法和措施
(1)算法的计算过程可能会比较复杂,在提高系统动态品质的时会遇到设计控制系统中相互矛盾性能指标取舍的综合问题。
(2)仿真结果可能会和预想中的不一样,结果不一致。
(3)系统进行仿真研究时,在系统存在外绕和参数摄动情况下,系统性能指标是否满足设计要求,环境的改变会造成系统在理想状况下得到的参数误差很大,将使基于理想模型设计的常规控制器失效。解决措施:在课题深入的研究下,肯定还会遇到一些不一样的问题,可以主动去翻阅资料,还可以和老师同学交流研究早日把问题解决,从而达到更好的课题设计,加油!
预期目标
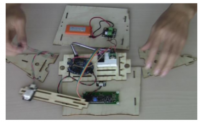
设计一款可以独立行走的双轮自平衡小车,一个集动态决策和规划·环境感知·行为控制和执行等多种功能与一体的综合复杂系统,其关键是在解决自平衡的同时,还能适应各种环境下的控制任务。
目录
第一章、绪论 2
1.1研究背景与意义 2
1.2课题研究的内容 3
第二章、总体方案的设计与分析 4
2.1阐述与分析 4
2.2对小车运行进行建模 5
2.4 自平衡车数学模型建立 9
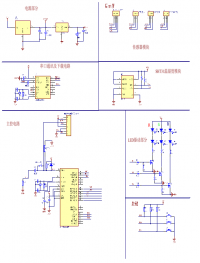
第三章、硬件设计 13
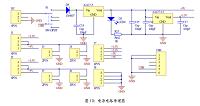
3.1电源模块设计 13
3.1.1智能车载电源的设计元素 13
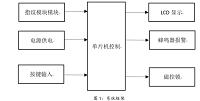
3.2单片机最小系统设计 15
3.2.1单片机最小系统介绍
3.3 两轮平衡小车系统电机驱动设计 22
3.3.1 两轮平衡小车电机驱动系统设计思路 22
3.3.2 电机驱动模块的选型及介绍 22
3.3.3 L298N驱动芯片介绍 24
3.3.4 L298电机驱动模块介绍 25
第四章、两轮平衡小车的软件设计
4.1两轮平衡小车系统的软件设计思路 22
4.2程序调试与参数整定 33
第五章 测试与调试 24
5.1测试和调试 24
5.2智能车测试程序 25
第六章 总结与展望 26
毕业设计附录目录: 27
附录1:程序清单 27
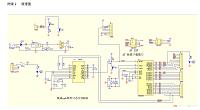
附录2:Arduino UNO R3原理图 36
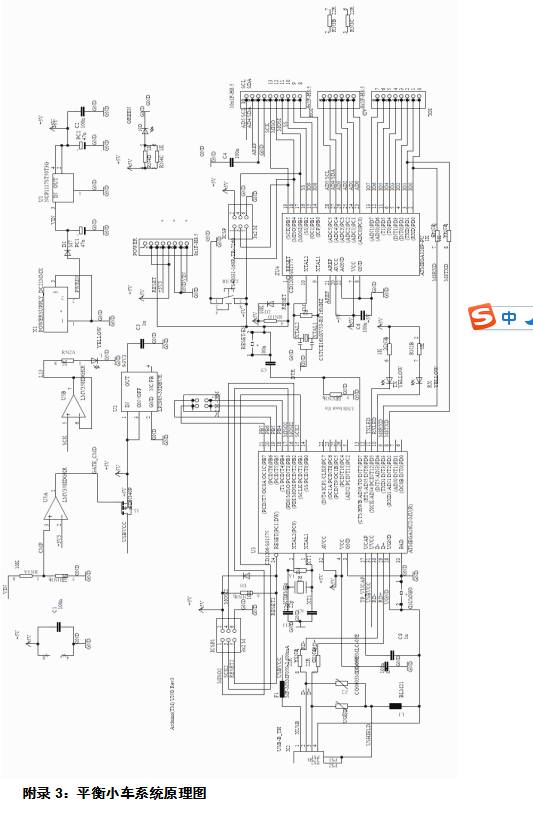
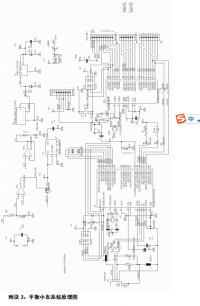
附录3:平衡小车系统原理图 38



