







基于Arduino开发板的循迹避障四足蜘蛛机器人设计
摘要: 本文设计一款便于操作的四足蜘蛛机器人,实现“穿越火线”用超声波模块检测,当检测到前方有障碍物时停止,并且摇头检测周围环境,向没有障碍物一方转弯;“防跌落爬行”把红外传感器安装在脚上,当检测到机器人走到桌子边缘,红外传感器就能检测到会踏空,然后后退转弯,实现防跌落爬行。四足式机器人结构简单,它的腿采用缩放形式的机构,每个机器腿可以运转多个角度,具有较强的承载能力、稳定性好,能够在慢速行走时保持较平稳的状态,又能够高速行驶。在娱乐、工厂、生活和军事等许多方面具有很好的应用前景,使用起来非常方便。
关键词:四足;循迹;避障
Four-legged spider robot design
Abstract: This article designs an easy-to-operate quadruped spider robot, which uses the ultrasonic module to detect “cross fire”, stops when it detects obstacles ahead, and shakes the head to detect the surrounding environment and turns to the side without obstacles; "Crawling" mounts the infrared sensor on the foot. When it detects the robot walking to the edge of the table, the infrared sensor can detect that it will step on the air and then turn back to achieve anti-dropping and crawling. The four-legged robot has a simple structure, and its leg adopts a zooming mechanism. Each machine leg can run at multiple angles, has strong carrying capacity, good stability, and can maintain a relatively stable state during slow walking. Can drive at high speed. It has good application prospects in many aspects such as entertainment, factories, life, and military,It is very convenient to use.
Keywords: four feet; tracking; barriers
目录
第1章 绪论 5
1.1 研究背景 5
1.2 机器人的发展状况 5
1.3 本课题的目标 6
第2章 总体设计方案 8
2.1 四足蜘蛛机器人的分析及说明 8
2.2 设计任务 8
2.2.1 设计制作一个爬行四足机器人 8
2.2.2 设计要求 8
第3章 模块选型及硬件设计 10
3.1 模块选型 10
3.1.1 主控制器的选型 10
3.1.2 超声波模块的选型 11
3.1.3 舵机的选型 12
3.1.4 红外模块的选择 13
3.1.5 电源模块的选择 13
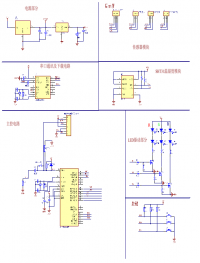
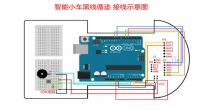
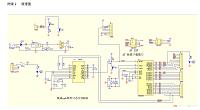
3.1.6 外围设备连接图 14
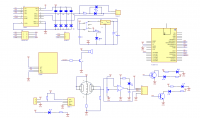
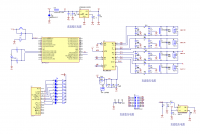
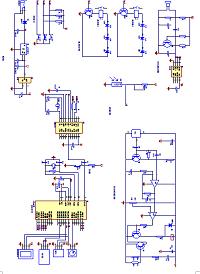
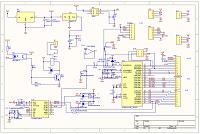
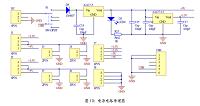
3.1.7 主控板以及驱动电路 16
3.2 机器人的机械设计 17
3.2.1 框架的搭建 18
3.2.2 机械臂 18
第4章 程序设计环节 20
4.1 舵机的工作 20
4.1.1 四足机器人爬行避障程序 20
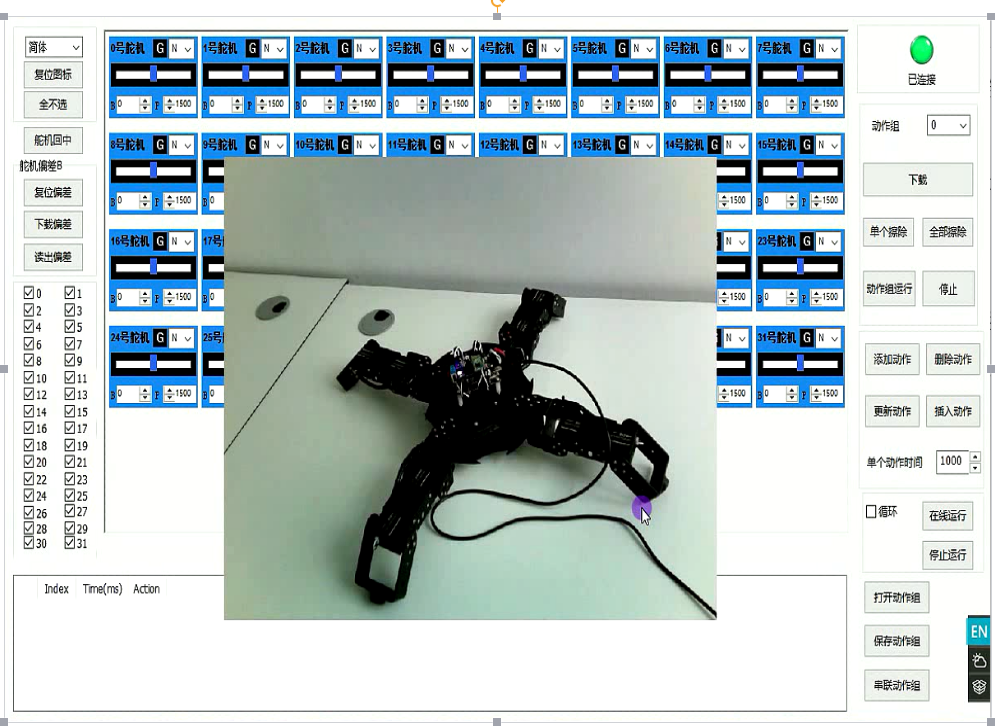
4.1.2 舵机微调 21
4.1.3 程序设计 22
4.2 红外的工作 23
4.3 超声波避障的实现 23
4.4 匍匐行走的实现 24
4.5 PS2遥控的实现 26
第5章 系统功能调试与测试 27
5.1 不供电调试 27
5.2 软硬件联调 27
第6章 总结与展望 29
6.1 总结 29
6.2 展望 30
附录1: 原理图和PCB 33
附录2: 程序 35
第1章 绪论
1.1 研究背景
随着经济全球化的发展,各种行业迅速发展推动世界经济结构趋向多元化的变化,但是其中也充满各种挑战,现在各行各业都追求效率,机器化、流水线、工厂化等促进着产业的发展,智能的四足机器人 因此被提出。在北京召开的第五届中国机器人峰会,以及国家让“人工智能”放到发展战略中,提出要创造出新的人工智能产品,为我国提升工业国力,这也将使得我国的经济良好的发展。四足机器人的发展需要各种领域技术的支持。社会生产力的发展必将促进机器人的发展,并且机器人的快速发展也将促进社会生产力的进步。这个机器人策略将所有利用数字和网络技术的系统与先进的传感器和人工智能一起全面定位为“机器人”的新概念。通过引领机器人新时代,包括物联网的到来,展示中国对世界的主动性。在人类处理高难度高危险的任务可以用机器人来代替。换句话说,体现出国力的强大,是通往发达国家不可缺少的道路。
1.2 机器人的发展状况
机器人是自动化的其中之一,可以自主的执行特定功能的装置。机器人工作方式有二种,将程序事先编辑好存储到机器人的运行芯片中去使其自动运行,还有一种是通过各种传感器识别依据人工智能的技术完成相应的指令。机器人的近代发展越来越普遍化集成化,大众化。在横向上看来,许多工业上的应用衍生到其他领域,比如医院的做手术,农业的水果采摘机,下水道的探测,还有潜海机器人等。四足动物丰富的性质,因为四条腿允许被动的稳定性,或没有主动调整位置保持站立的能力。机器人也是如此。四腿机器人比具有更多腿的机器人更便宜,更简单,但它仍然可以实现稳定性。有很多行业中大多数都可以应用机器人去创造。在纵向上,由许多类型的机器人,有塔吊大小的,近几年来有微型化机器人可以进入人体进行手术代替人工手术也是以后发展的趋势,并且越来越像人类会思考会自主的行动。我国提出“中国制造2025”里面有关于机器人这方面的规划。服务性机器人已经进入人类的家庭,如扫地机器人等。像真空吸尘器和相关物品的清洁工具已经和标准真空一样熟悉机器人是一个看起来没有边界的领域。谷歌正在测试自动驾驶汽车。麻省理工学院正在研制仿生武器。Savioke公司正在尝试为酒店客人提供零食的机械管家。这些机器人或机器人系统将被编程为综合信息,然后采取适当的有用行动。广义而言,机器人将能够看到,思考和做到。说到机器人和智能,必然离开不了各种传感器,更是浩大的工程系统。机器人设备的开发具有高度的智能和对人类需求的理解。这些新型人工智能设备开发的重要途径之一就是他们现在能够与我们沟通。他们可以从所有人身上学习,确定情绪并调整偏好。他们以一种只有AI才能认识我们的方式了解我们。有一些很棒的助手可以帮助我们完成任务。他们可以播放音乐,在互联网上查找内容,连接设备,提供旅行和天气提示等等。在机器人发展的行业中,中国在很早以前就引进了机器人。我国机器人在发展上有地域上的差异,北方生产的机器人大多数是流水线上的机械手等,南方的机器人主要是服务类型的,比如医疗等方面。
目前我国机器人需求方面主要在产业升级、机器代替人工和从事劳动人口的比例机构。我国许多领域自动化的需求逐渐增加,劳动力成本上升但是一些机械性不需要什么工艺,精密度的制作更加需要自动化,机器化代替人工的潜力巨大,且一些特殊行业的危险性增加,更加需要自动化和机器人的加入。
现在,发展好的国家许多创造企业生产运用流水线,机器人使得生产线效率化,精细化的生产,产品的生产、产品的检测和存储物流整个过程实现自动化,确保生产物品的稳定和可靠性。但是我国现在大多数制造企业目前步伐在自动化发展阶段后端,消费者对产品的要求不止在功能上而且出现在精度上,中国在制造业也向着发达国家靠近,集约化,智能化发展,也意味着自动化和机器人技术需要迅速发展,不仅需要速度,而且需要质量。虽然我国目前制造业在机器化,智能化,自动化促进机器人的发展,但是中国在这方面和发达国家还是有许多差距。也意味我国其机器人和自动化市场还有很大的发展的空间,机器人市场宽广。
1.3 本课题的目标
随着机器人的发展和传感技术的发展,一些危险的场景作业以及特殊场合,如救援火灾现场,辐射现场等,这些场合有许多不确定因素会对工作人员造成伤害甚至危及生命。或者一些重复的作业,人工作业的时间强度比较低相比机器人,机器人只要有充足的电力,就可一直工作下去,可以用机器人代替解放劳动力。常见的步行机器人包括六足、四足等,六足机器人在稳定性上具有良好的作用,但是结构复杂。四足机器人结构比较简单,行使稳定性好,能够应对不同的地形环境。四足机器人汇聚了仿生学、机械学、控制学等,具有非常好的实用性能。
本一种四足蜘蛛机器人所预期达到的技术指标为:
(1)要求能够四个方向自由活动;
(2)可以自动校水平,根据特定传感器作出反应;
(3)超声波模块检测,前方路径有阻碍时停止运行,并且摇头检测周围环境,向没有障碍物一方转弯;
(4)红外传感器安装在脚上,当检测到机器人走到桌子边缘,红外传感器就能检测到会踏空,然后后退转弯,实现防跌落爬行;
(5)通过PS2手柄操作。
第2章 总体设计方案
2.1 四足蜘蛛机器人的分析及说明
如今各行各业都在追求效率,使得各种环节需要优化。这个就需要有智能化和自动化的电子产品和设备,人们对自动化系统处理的价位、能效、功效和安全程度上有不同的需求。使得许多企业开发的项目都向着功能效率上发展。各个零件厂商在市场上形成价格优廉,使得机器人组装在价格上与以往相比好的多。工厂里的物流运货可以采用四足机器人,它具有一定的承载力。目前,在救援、运输、探测方面有广泛的市场,而这个些在一些特殊领域中必不可少,更加促进机器人的发展。
本设计的主要目的是开发出一款能够根据传感器自动识别并且运动到指定地点,并且能够人为的远程操作自由运动。此机器人并不是简单的从A运行到B点,而是在行走的过程中如果遇到一些障碍物能够自主的解决,也就是达到避障的效果,继而到达B点。并且在移动过程中要载有一定重量的物品,在这个过程中对机器人的电量要满足,通过超声波模块定时的检测行动四周是否能够行走,并且判断出能够行走的路径来。此机器人可以搭载相应的设备完成“野外侦察”,的功能并且将所采集到的一些图片、气候、声音数据传回后方。
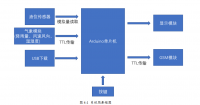
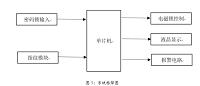
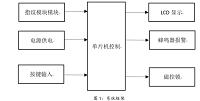
主要功能结构模块包括:OLED显示、声音传感器、超声波模块、红外传感器、光敏电阻、LDX-218高精度数字舵机、舵机驱动单元、Arduino控制板、电源控制单元,红外接收模块、蓝牙模块,PS2手柄。可以通过采集声音、光线感应、测距完成避障,循声运动等一些高难度动作,多个模块可以使机器人更加的灵活。
主控板采用Arduino Uno它采用mega328p的芯片,作为主控板他有许多优点,开发环境简单语言简凑,有图形化界面,适合各类层次的学习者使用,各类模块都有相应的库函数调用简单方便快捷。
2.2 设计任务
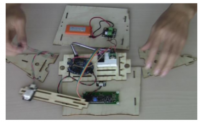
2.2.1 设计制作一个爬行四足机器人
2.2.2 设计要求
机器人可以按照指定的路径行走,能够在对行走过程中遇到的障碍物进行判断绕过障碍物到达目的地,行走时四足相对平稳,能够承载一定量的重物,也可以通过无线控制它的运动轨迹。
要求能够四个方向自由活动,根据特定传感器作出反应,需要完成的任务如下:
(1)课题应用及市场调研分析;
(2)对可以的方案先分析再论证可行性;
(3)各主要器件及单元电路的选用方案、性能分析及功能介绍;
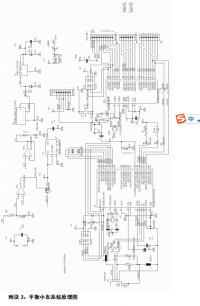
(4)系统框图及电路设计;
(5)系统电路图及印制板图;
(6)系统总装总调;
(7)毕业设计总结。
参考文献
[1] 龚佑红,周友兵.数字通信技术及应用[M]. 北京:电子工业出版社. 2014.7(3)
[2] 2015-2020年中国焊割设备行业产销需求与转型升级分析[M]. 北京:前瞻产业研究院. 2014.9.3
[3] 工业机器人的战略意义及发展对策[Z]. 北京:中研网.2014.5.19
[4] 门禁系统报价[Z]. 百度文库(2016.2)
[5] GSDzone.网络课堂.[Z]http://study.gsdzone..bysj1.com/course/11
[6] 魏伟,胡玮,王永清. 嵌入式硬件系统接口电路设计[M]. 北京:化学工业出版社.2014.6(3)
[7] 秦溢霖,李晴,虚拟仪器应用技术项目教程(第二版)[M]. 北京:中国铁道出版社.2015.2(3).
[8] 王奕然.工业视觉机器人的通信与控制技术研究[D]. 北京:电子科技大学.2015.
[9] 黄振宇.移动机器人视觉系统的研究与应用[D]. 北京:华中科技大学.2004.5.1
[10] 卜弘毅,业兵,侯庭波.移动机器人视觉控制[D]. 北京:机器人技术与应用.2004.5.30
[11] 康光华,陈大钦,张林.电子技术基础(第五版)[M]. 北京:高等教育出版社.2013.5.
[12] 常慧玲,牟爱霞,薛凯娟.传感器与自动检测(第2版)[M].北京:电子工业出版社.2012.7



