


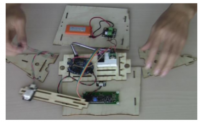





基于Arduino的两轮平衡车
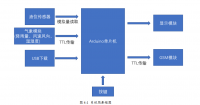
摘要:基于Arduino的两轮平衡车设计主要是以单片机为核心,结合系统电源、姿态传感器和电机驱动电路、USB-Serial协议转换以及蓝牙透传模块等硬件所组成。本设计体系由系统的总体方案、硬件设计和软件设计三个方面组成阐述了基于Arduino的两轮平衡车设计。
关键词:基于Arduino的两轮平衡车设计;单片机;总体方案;硬件设计;软件设计;测试过程。
Segway based on the Arduino
Abstract: Self-balancing car based on the Arduino designed mainly -based microcontrollers as the core, combined with the power system, attitude sensors and a motor drive circuit, USB-Serial and Bluetooth transparent transmission protocol conversion module hardware components. The system design and software design consisting of three aspects elaborated by the overall scheme of the system, hardware Arduino of two balanced vehicle design.
Keywords: Self-balancing car based on the Arduino; Single chip microcomputer; System solutions; Hardware design; Software design; testing process.
目录
1.引言 4
2.基于Arduino的两轮平衡车设计的总体方案 5
2.1 基于Arduino的两轮平衡车的整体方案和设计思路 5
2.2 基于Arduino的两轮平衡车的基本原理 5
3.基于Arduino的两轮平衡车的数学建模 6
3.1 建模分析 6
3.2 模型假设一 6
3.3 模型假设二 7
3.4 模型假设三 7
3.5 基于倒立摆系统平衡车的受力分析 7
3.6 两轮平衡车的数学模型架设 11
3.7两轮自平衡车的数学建模解析 11
3.8 基于Simulink的自平衡车数学模型仿真 14
3.9 加速度传感器的原理解析 16
3.10 加速度计和陀螺仪的解析 18
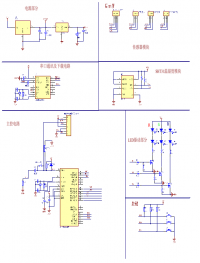
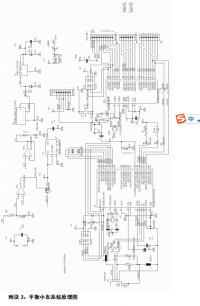
4.基于Arduino的两轮平衡车的硬件设计 20
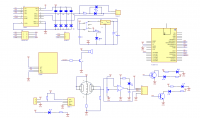
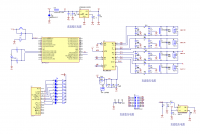
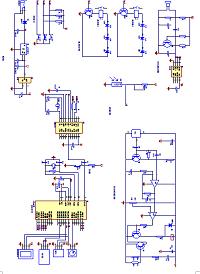
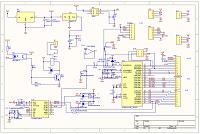
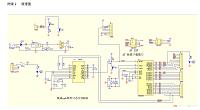
4.1 硬件原理图(另附) 20
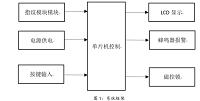
4.2 关于单片机最小系统的硬件概述 20
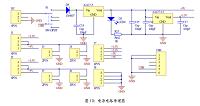
4.3 电源系统 21
4.4 姿态传感器系统 22
4.5 电机驱动电路系统 23
4.6 蓝牙透传模块系统 24
5.基于Arduino的两轮平衡车的软件设计 25
5.1 软件设计概述 25
5.2 PID控制器设计 25
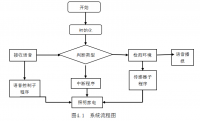
5.3 主程序框架 28
5.4 系统编译器 29
5.5 系统初始化 29
5.6 主循环-125Hz循环 30
5.7 基于Arduino的两轮平衡车源代码(见附录) 31
6.基于Arduino的两轮平衡车的调试策略 32
6.1 系统调试工具 32
6.2系统硬件电路调试 32
6.3姿态检测系统调试 33
6.4控制系统PID参数整定 36
6.5两轮自平衡小车的动态策略 37
7、总结及参考文献 38
参考文献 39
附录 41
参考文献
[1]He Kezhong,Sun Haihang,Guo Mtthe ed all.Research of intelligent mobile robot key techniques[J]. IEEE International Conference on IndusIrial Technology,1996:503~507.
[2]霍亮.两轮自平衡电动车的关键技术研究[D].哈尔滨:哈尔滨工程大学,2010.
[3]屠运武,徐俊艳,张培仁.自平衡控制系统的建模与仿真[J].系统仿真学报.2004(04).
[4]吉训生,王寿荣.MEMS陀螺仪随机漂移误差研究[J].宇航学报.2006(04).
[5]Ren Yafie,Ke Xizheng,Liu Yijie.MEMS Gyroscope Performance Estimate Based on Allan Variance[A].In Proceedings of 2007 8th International Conference on Electronic Measurement & Instruments[C]. Xi'an China.Vol.1, 260-263.
[6]耿延睿,崔中兴.组合导航系统卡尔曼滤波衰减因子自适应估计算法研究[J].中国惯性技术学报.2001(04).
[7]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社, 1998.
[8]薛涛.单片机与嵌入式系统开发方法[M].北京:清华大学出版社,2009.10.
[9]孙传友,孙晓斌.测控系统原理与设计[M].第二版.北京:北京航空航天大学出版社, 2007.12.
[10]于庆广,刘葵,王冲等.光电编码器选型及同步电机转速和转子位置测量[J].电气传动, 2006,36(4):17~20.
[11]谭浩强.C程序设计[M].北京:清华大学出版社,2005.
[12]康华光.电子技术基础[M]..北京:高等教育出版社,2006.1.
http://www.bysj1.com/html/6486.html
http://www.bysj1.com/html/6469.html
http://www.bysj1.com/html/6483.html



