








基于UG自平衡工作台调整机构设计与Protues电路设计与仿真
摘要:本课题主要完成自平衡工作台调整机构设计与仿真,具体工作为自平衡工作台调整机构的研究、自平衡工作台调整机构的设计,自平衡工作台调整机构的布线,电路的设计、电路的仿真。
关键词:三维造型;自平衡;Protues电路设计与仿真
Since the balance table adjusting mechanism design and simulation
Abstract: This toPic mainly comPlete self balancing workbench adjusting mechanism design and simulation of concrete for the research of self balancing workbench adjusting mechanism, the balanced workbench adjusting mechanism design, self balancing workbench adjusting mechanism of wiring, circuit design, circuit simulation.
Keywords: Three-dimensional modelling; Since the balance; Protues circuit design and simulation
目录
第一章 绪论 2
1.1本课题简介 2
1.2课题研究的内容 2
1.3课题研究完成后的成果 2
1.4自平衡工作台的研究背景 2
第二章 自平衡工作台的工作原理的分析 4
2.1自平衡工作台调整机构的设计要求 4
2.2检测元件——陀螺仪(角运动检测装置) 4
2.3动力原件——步进电机 5
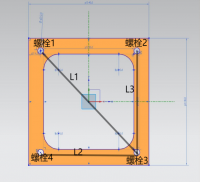
2.4齿轮齿条传动的特点 6
2.5本章小结 7
第三章 自平衡工作台调整机构的设计 8
3.1使用软件工具简介(UG) 8
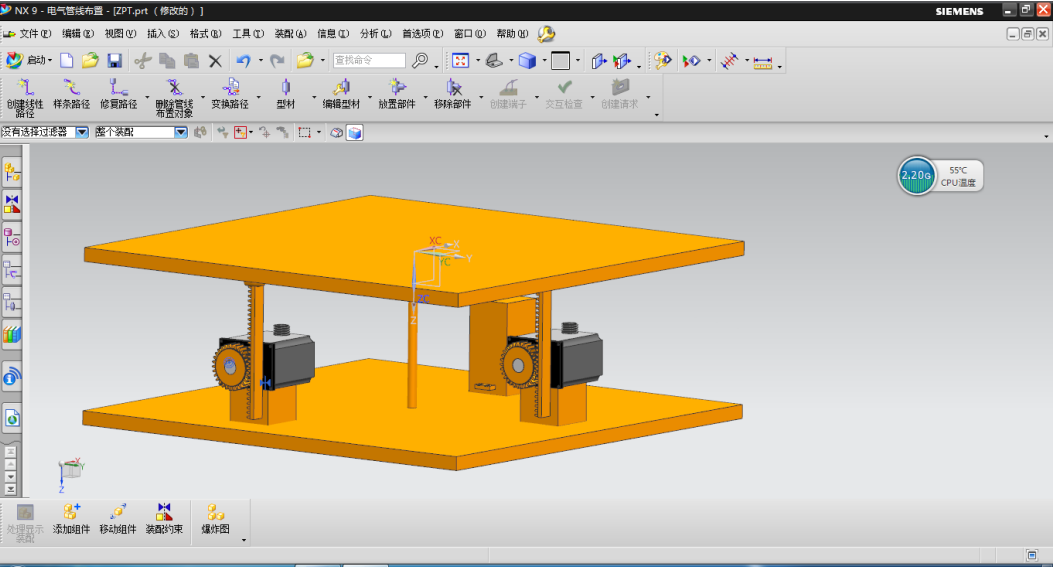
3.2UG设计绘制自平衡工作台调整结构的过程 8
3.3UG布线流程 21
3.4本章小结 24
第四章 自平衡工作台自平衡电路设计 25
4.1 Protues简介及应用领域 25
4.1.1 Protues简介 25
4.1.2 Protues的应用领域 25
4.2 自平衡工作台控制系统硬件选择和电路设计 25
4.2.1 ATmega16 简介 25
4.2.2 硬件结构 25
4.3 Protues制作电路 27
4.4自平衡工作台控制系统的电路设计 31
4.5 本章小结 34
第五章回顾总结 35
课题成果 35
参考文献 36
附 录 37
第一章 绪论
1.1本课题简介
利用我们这三年在学校所学习的东西,然后根据网上的资料和文献,研究设计自平衡工作台的平衡机构。再使用三维UG进行三维模型造型,使用Protues设计电路并制作电路仿真。
1.2课题研究的内容
自平衡工作台调整机构设计与仿真。对现有的自平衡系统的研究与学习结合在学校所学习的知识,研究自平衡工作台的平衡调整机构,经过搜索的资料而使用Protues绘制电路控制的电路图而后进行仿真.
1.3课题研究完成后的成果
本课题完成后的主要成果包括以下内容:
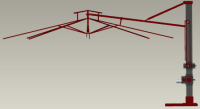
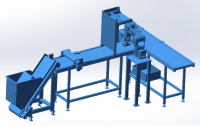
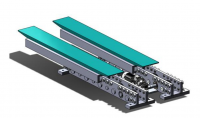
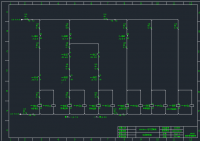
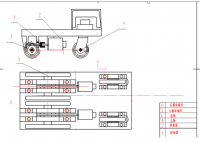
(1)自平衡工作台调整机构的三维模型。
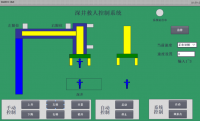
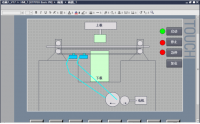
(2)电路控制图。
(3)电路仿真。
1.4自平衡工作台的研究背景
随着社会的卓越的发展和人类文明水平的明显的提高,人们尤其是那些残疾人越来越需要运用现代的高新技术和自由生活的质量来改善他们的生活。因为交通事故、自然灾害和人为灾难和各种各样的疾病,在每一年都有数以万计的人失去了一种或者多种如行走的能力。是以,对用于扶助残疾人士行走的机器人轮椅的研究已渐渐成为了热门,比如西班牙、意大利等国。自平衡工作台便是其中极为重要的一环。
移动机器人因为其光明的使用远景早已成为了机器人领域的一个非常重要的分支,由于其行动形式差别能够分为轮式,履带式,腿式,推进式等。在这些之中轮式因为结构简单,成本低,能量使用率高等等的特点早已成为 了重要的科研方向之一。因为这种机器人的使用环境复杂,所以自平衡机器人就应运而生了。
由于自平衡工作台的结构特殊,体积小,运动灵活,适应地形能力强,适用于狭小危险的工作环境,因此它有着广阔的前景,现在社会上就有许多领域使用,其中比较经典的应用包括了代步工具,通勤车,邮件派送,紧急服务,空间探索,战场侦查,危险品运输,灭火,智能轮椅,高科技玩具,多机器人合作,机器人足球,控制理论测试平台等方面。除此之外,由于各方面科技不断的进步与发展为自平衡工作台提供了坚实的理论基础和降低了研制成本,有利推进了其理论研究到实际使用的发展进程。
一、选题简介、意义
本课题研究的是自平衡工作台机构。自平衡工作台是一种以单片机为控制核心,陀螺仪作为检测元件,步进电机作为动力元件,齿轮齿条作为执行部件的一种智能化的平台。自平衡工作台就是通过调整机构的升降来实现工作台的自平衡的。这种自平衡工作台可以在很多的领域使用的到。将这种自平衡工作台制作成轮椅或者是担架,对病人,残疾人等行动不方便的人都是比较有帮助的,它能让这些人群有更好的更舒适的环境。它不仅仅能够载人,还能够载物。这种绝对的平衡能使许多不方便运输的问题得到解决。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
课题研究:自平衡工作台调整机构,包括结构,电机,单片机和传感器等方面
主要研究内容:主要研究设计自平衡工作台的调整机构,通过不同的机械结构的研究设计出所需要的机构,研究学习典型电路的绘制 学习Protues的使用方法
要解决的问题:在自平衡方面,需要用UG软件,画出结构的示意图。在电机控制方面,需要用Proteus软件做出仿真。
研究方法:通过网上查找相关资料和视频,使用UG绘制相关机构。学习Proteus软件,并分别进行步进电机和直流电机的仿真。
三、设计(论文)体系、结构(大纲)
第一章绪论主要介绍课题的研究背景,本文的主要研究内容和成果。
第二章 对自平衡工作台的原理分析,并概述了几个基础元件。
第三章 自平衡工作台调整机构的设计,首先介绍了使用软件UG,这个机构设计主要分为两个部分,分别是自平衡工作台调整机构的三维建模和其步进电机的基础布线。
第四章 自平衡工作台的电路设计,首先介绍了使用软件Protues,介绍了部分主要的硬件,讲述了绘制电路的过程。
第五章 回顾总结
在本论文中我们通过研究分析国内外现有的自平衡机器人,对我们需要的自平衡工作台进行调整机构的设计,并进行电路的设计,其中加入了自已的想法意见和许多高新技术,最后对自己进行了总结。
参考文献
[1] Protues电子电路设计及仿真》[S] 谢龙汉 莫衍 电子工业出版社
[2] 《电动机的单片机控制》[S] 王晓明 北京航空航天大学出版社
[3] 《基于Protues仿真的单片机技能应用》[S] 金杰 郭宝生 编著 电子工业出版社
[4]《两轮自平衡机器人的研究》 [D] 王晓宇 哈尔滨工业大学
[5] 《基于MMA7260两轮自平衡小车控制系统设计》 [D] 杨继志 郭敬 北京航天实验技术研究所
[6] 《两轮自平衡移动机器人建模与控制研究》 [D] 茅力菲 华中科技大学
[7] 《独轮自平衡机器人建模与控制研究》 [D] 王启源 北京工业大学
[8] 《一种两轮自平衡移动平台的设计与实现》 [D] 李斌斌 华南理工大学
附 录
附件1:毕业设计任务书
附件2:开题报告
附件3:毕业设计(论文)指导记录表
附件4:UG模型设计
附件5:Protues电路仿真



