








带机器视觉六轴机械手关于食品分拣系统应用的电气控制设计
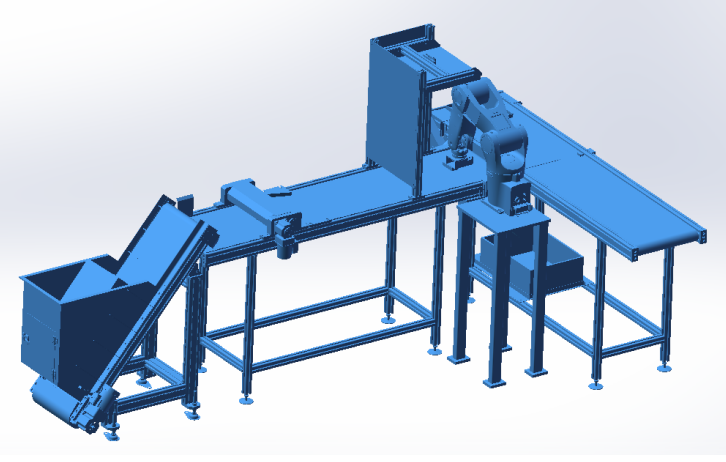
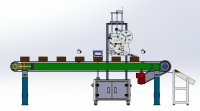
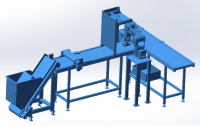
摘要 :本次项目设计的带机器视觉六轴机械手关于食品分拣系统应用以机械专用装置(上下料机构)、伺服控制系统、机器人应用系统和HMI组态基础,设计构建了基于视觉定位技术的食品分拣系统。在运行过程中,将大量食品通过上下料机构运输至传送带上,传送带将饼干从料斗运至拍照系统下方并停止,此时机器视觉开始识别并将结果传送至PLC,PLC控制机械手吸盘将食品放入托盘中并重复此过程。利用PLC控制和传感器技术,结合气动控制、电气传输等,运用功能流程图和梯形图,实现食品的自动分拣摆盘。
关键词:PLC 伺服控制系统 机器人应用系统 机器视觉
Design of six axis visual control system for food sorting machine
Abstract The six axis manipulator with machine vision designed in this project is based on the special mechanical device (loading and unloading mechanism), servo control system, robot application system and HMI configuration to design and build a food sorting system based on visual positioning technology. During the operation, a large amount of food is transported to the conveyor belt through the loading and unloading mechanism. The conveyor belt transports the biscuits from the hopper to the lower part of the photographing system and stops. At this time, the machine vision starts to recognize and transmit the results to the PLC. The PLC controls the manipulator suction cup to put the food into the tray and repeat the process. Using PLC control and sensor technology, combined with pneumatic control, electrical transmission, etc., and using functional flow chart and ladder diagram, the automatic sorting and swing of food tray is realized.
Key words PLC servo control system robot application system machine vision
目 录
第一章 绪 论 1
1.1 项目研究背景及意义 1
1.2 基于机器视觉的机器手分拣系统现状 2
1.2.1 国内分拣机器手现状 2
1.2.2 国外分拣机器手现状 2
1.4 本次项目研究目标及内容 3
1.4.1 研究目标 3
1.4.2 研究内容 4
第二章 食品分拣系统应用的系统设计 5
2.1 需求分析 5
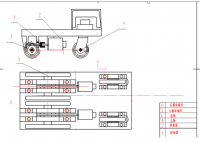
2.2 整体方案设计 5
2.3 系统硬件 7
2.3.1工业相机及光学镜头 7
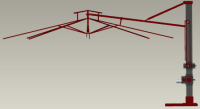
2.3.2分拣机器人及伺服驱动器 10
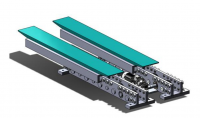
2.3.3 传送带以及轮式编码器 12
2.3.4 真空抓取装置 13
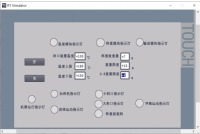
2.4 系统软件设计 13
2.5 章节小结 13
第三章 食品分拣系统的电气控制设计 14
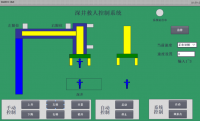
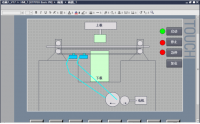
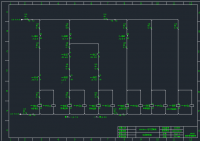
3.1控制面板整体设计 14
3.2 相机模型 17
3.2.1针孔成像模型 17
3.3相机标定 18
3.4图像预处理 19
3.5 整体技术方案 19
3.5.1 自动程序 19
3.5.2 数据处理模块 21
第四章 食品分拣系统实现与分拣实验 23
4.1硬件平台搭建 23
4.2系统工作流程 24
4.3系统分拣实验与结果 24
4.4 本章小结 25
结论与展望 26
致 谢 27
参考文献: 28
第一章 绪 论
1.1 项目研究背景及意义
机器视觉系统是人工智能的一个发展分支。其主要特征是进一步提高了生产的灵活性和自动化水平,其次是大幅提高了反复繁琐作业的效能。机器视觉不仅不用担心人工视觉的疲劳,而且比人的眼睛更准确,更快。随着新的电磁波技术应用于物流运输,医疗装备,半导体加工,国防,交通运输等产业,该技术可以提高生产效率和产品质量,确保基础产业的快速完整运行[1,2]。
机器手是一种自动装置,它不仅可以捕捉不同姿态下、不同风格和大小的物体,而且可以灵敏地捕捉目标物体并执行各种动作。即便机械手的灵巧度赶不上人类的手,它仍具有能连续工作的特点,且不怕疲劳和危险,举起重物的能力比远超过人类。因此在加工制造产业,国防,制造业,医疗保障等许多领域得到了越来越多的应用。随着时代的进步,中国不仅在经济发面获得了大幅度的提升,工业技术水准也在国际方面获得大幅度的提升。机械手作为生产方面具有不可或缺的能力,对此,与之相关的技术需求和创新也在不断增加。
基于机器视觉与机械臂的发展和应用,将机器视觉与机械臂连接起来,建立了一个自动分捡系统。以前的分捡的主要力量是人力,工人在生产线上进行手工分拣拾取,这些过程不仅提高了产品的无关价值,而且由于人体的疲劳,无法保证分拣拾取的速率和质量。除去不会遭受恶劣的生产环境影响外,自动分拣系统也不会受到外部空间环境的影响。过去的分拣系统的由于检测技术、液压与气动技术、目标定位技术等相关技术不完善,导致分拣效率和精准度远远达不到人工的平均效能,因此在实际的行业生产中并没有收到良好的反响。随着时代的不断发展,各种相关技术在其基础上取得了长足的进步,定位越来越准确,分拣精度也在不断提高。因此,自动分拣系统可以很好地应用于实际生产中,它可以代替生产线上手动分拣繁重、重复对象的工作,对提高生产效能起着重要作用。今天,随着劳动成本的日益增加,大众的环保意识也在提高,大型综合分拣生产线不断涌现。重复、高精度、无人值守的自动分拣系统已成为主要的发展趋势。
1.2 基于机器视觉的机器手分拣系统现状
1.2.1 国内分拣机器手现状
中国的图像处理技术研究相对较晚,直到20世纪90年代才进入发展阶段。在国家政治的支持下,国内许多企业、机构和大学都加入了视觉技术的研究,为中国视觉技术的发展做出了巨大的贡献,在基础和重要的视觉技术方面取得了很大的进步。近年来,国内许多公司和研究机构开发了基于图像处理系统的产品,广泛应用于电子元器件、制药和食品分拣、质量控制和压力测试等领域。
张伟芬等人设计了一种基于机器视觉的智能物料分拣系统。基于机器人手臂硬件和海康威视智能相机,对采集到的目标图像进行灰度处理和形态学处理,并采用多阈值分割技术结合模板匹配算法,实现对排序对象的快速识别。通过机械手对输送带上识别出的物料进行智能分拣[3]。邹腾跃等人提出了一种具有离散特征点的物体轮廓表示方法,并通过形状匹配对材料进行分拣。最后,机器人根据视觉系统的分拣结果完成分拣工作[4],硬件系统由motoman-SK6机器人和摄像头组成。基于形状和内容匹配的物料分拣方法可以有效提高分拣的精度和稳定性。王德明等人提出了一种基于实例分割网络的食品分拣系统,该系统由图像采集、物体识别和物体位姿计算三个模块组成[5]。该抓取系统可以实现对不同形状、纹理弱、堆叠分散的物体的快速目标识别和位姿估计,其性能可以满足实际分拣工作中不同部位的要求。于晓阳等人提出了一种基于SGH识别算法的机器人双目视觉分拣系统[6],为了提高本系统分拣的精度,使用sgh空间颜色的直方图,灰度共生矩阵及hu力矩特点,分别组成的颜色特征、纹理特征以及形状特征,sgh相似性判断函数,建立完成了自动分拣。
1.2.2 国外分拣机器手现状
瑞士ABB、德国KUKA、日本FANUC以及安川电机四大企业在全球工业机器人市场的占有率超过50%,这四家传统机器人企业处于全球机器人产业的第一梯队[7,8]。
日本FANUC公司凭借优秀的数控技术系统和智能机器视觉技术已经能够实现机器人制造机器人的智能化生产任务。FANUC研发的M-710IC机器人凭借3D视觉传感器bin- pick技术,能够对不同的物体进行智能分捡[9]。
TrueView是ABB公司开发的工业机器人,采用TrueView视觉系统。TrueView拥有一个高度优化的视觉和机器人系统之间的通信接口,能够在不断变化的工作环境中高效地完成定位、检查和组装任务,所有的这些都以完全自动化、高度灵活和高精度的方式进行。当不同形状的物体进入摄像头视野时,机器人可以对不同种类的物体进行分拣和识别,然后使用末端机械手抓取不同的物体并将其放置在不同的位置。工业机器人与机器视觉相结合的智能分拣技术,不但提高了作业效率,而且降低了人工成本[10,11]
k.rahardja等人研究开发了一种叫bin- picking的零件分拣系统,通过简单的圆弧边界特征可以对不同的零件进行分拣。这个系统可以对不同的零件进行分拣[12]。机器人视觉技术的应用会对临床医学技术的发展有很大的帮助。由rethinkrobotics公司开发的baxter可以帮助医生进行手术,并可以从托盘中取出多种手术工具。然后根据工具种类的不同,放置在不同的位置,完成分拣[13]。2015年,推出了bin picking manager,并配有修正模块、通信模块和训练模块,以便机器人能够使用这些随机排列的部件[14]。T.P.Tho等人研发了一种基于机器人的视觉分拣系统[15],该系统可以识别物体的种类和位置,并将筛选过程的结果转换为储存及信号,与delta机器人控制系统进行通信,完成机器人对食品的筛选工作。
1.4 本次项目研究目标及内容
1.4.1 研究目标
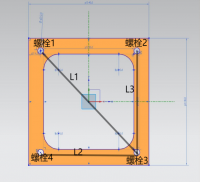
分析食品分拣系统的功能及其所要做的任务,通过视觉系统标定方法,运用X-Y轴标定方法确定食品所处位置,确定机械手的抓取方式以及食品传送带和托盘传送带的运行方式,以及相关各个组件的启动、停止、保险等功能,在博图中建立相关梯形图。并后续进行机械手的抓取策略调整、传送带速度调节、数据传输关键技术改善及故障处理机制完善。
通过检索国内外相关研究资料,结合大学四年所学知识,完成一套简单的关于食品分拣系统应用的电气控制设计。该系统可以通过传送带将食品(食品不发生叠加现象)运至机械手下方,然后机器视觉系统获取食品位置,通过plc控制机器手机械手抓取方向,随后机械手迅速地抓取食品并摆放至餐盘正确位置,随即传送带将装好食品的托盘运走,循环此步骤。
1.4.2 研究内容
结合本次项目的目标以及最终结果,本次的项目由主要有如下几个步骤组成:
1.结合本项目相关的社会研究背景,认真研读了相关文献,在老师的指导下进行了相关的市场调研,对比了国内外相关技术和研究现状,提出了本项目的最终目标和内容。
2.了解并分析与机器视觉相关的知识,学习相机目标检测和定位的基础知识,使用图像预处理技术对图像进行处理,然后进行机器视觉标定实验,为接下来的六轴机器人抓取打下基础。
3.设计基于机器视觉的六轴机械手关于食品分拣系统,主要由以下几部分组成,分别为传送带单元、图像采集单元、图像处理单元、以及机器手分拣单元。根据前置条件搭建成硬件实验样品平台以及实现系统软件,在样机上完成系统对食物的分拣实验。
参考文献:
[1]马金奎,路长厚,程英.机器视觉测试系统[J].工具技术,2015(9):129-132.
[2] 陈洋,张林.工业视觉检测系统及应用[J].科技展望,2015(16):119-121.
[3]张卫芬,汤文成.基于机器视觉的物料自动分拣系统研究[J]组合机床与自动化加工技术,2019(6):34-37.
[4]邹腾跃,唐小琦,宋宝,等.基于形状内容分析的机器人物料分拣系统[J].组合机床与自动化加工技术,2013(5):48-51.
[5]王德明,颜熠,周光亮,等.基于实例分割网络与迭代优化方法的3D视觉分拣系统[J].机器人,2019,41(5):637-648.
[6]Yu Xiaoyang,Liu Shuang,Pang Ming,et al.Novel SGH recognition algorithmbased robot binocular vision system for sorting process[J].Journal of Sensors,2016,1(1):1-8.
[7]王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-13.
[8]计时鸣,黄希欢.工业机器人技术的发展与应用综述[J].机电工程,2015,32(1):1-13.
[9]夏柯,基于机器视觉的机械工件分拣技术研究[D].上海:上海交通大学,2017.
[10]任磊.基于视觉的机器人快递分拣系统研究[D].杭州:中国计量大学,2018.
[11]Moradi D.M., Nahavandi S.Teleoperation of AB B industrial robots[J].IndustrialRobot an International Journal,2014,41(3): 286-295.
[12]Rahardja K.,Kosaka A.Vision-based bin- picking:recognition and localization ofmultiple complex objects using simple visual cues[C]//International Conference onIntelligent Robots and Systems.Osaka,Japan:IEEE,1996:1448-1457.
[13]Tan Huan,Xu Yi,Mao Ying,et al.An integrated vision -based robotic manipulationsystem for sorting surgical tools[C]/1 International Conference on Technologies forPractical Robot Applications.W oburn,USA:IEEE,2015:1-6.
[14]童磊面向机器人抓取的零件识别与定位方法研究[D].厦门:华侨大学,2018.
[15]Tho T.P.Thinh N.T.Design and development of the sorting system based onrobot[C]/2015 15th International Conference on Control, Automation and Systems.Busan,Korea:IEEE,2015:1639-1644.
[16]Xue J, Wang X,Ni C. Research of Camera Calibration Method Based on Confocal Conic Curve[C]//2018 13th World Congress on Intelligent Control and Automation(WCICA).IEEE,2018:1555-1560.
[17]Ya-liP, Shi-gang LIU, Zhao PEI,et al.Linear Camera Self-Calibration Method Based on Non-Rigid Trajectory Basis[J].ACTA ELECTONICA SINICA,2017,45(1):135.
[18]Abdulla,Mohamed,Phil,et al.Automating Active Stereo Vision Calibration Process with Cobots-ScienceDirect[J].IFAC-PapersOnLine, 2017,50(2):163-168.



