








基于UG深井救援机械手机械结构与PLC控制系统设计
摘要:随着深井掉人的事故频繁发生,据有关部门统计全国每年发生此类事故有上万起,造成的生命财产损失无法估量。机井是农村重要的重要资源,他们装在地头路边,没有掩盖物,周围也没有提示标志,让人们难以注意,由此造成的深井掉人事故较多。目前,虽然有深井救援类的装置,但是也存在着较大缺陷,没法为深井救援带来方便,也不能广泛使用。常见的营救方法就是施救人员下井施救或者使用挖掘机等大型设备施救。但井一般较深,施救人员直接下井会有缺氧、卡在井里等威胁,而且井的口径过小时施救人员根本无法进入,利用挖掘机等大型设备救援,不仅时间长、安全性差,还不保证井下被困人员的生命安全,特殊情况下利用挖掘机也无法营救。因此设计一种高效、高成功率的机械手代替消防员实施救援,能大程度减少生命财产损失和减少悲剧的发生。。
本设计能够避免在施救过程中给施救人员带来的安全隐患,解决由于井口太小施救人员无法下井施救的难题,提高救援的效率和成功率.要完全代替施救人员下井施救,机械手要有较高的灵活性和可控性.被困人员在井底的被困形式多样,机械手必须能够适应于多种复杂情况下的救援工作,解决由于井口太小施救人员无法下井施救的难题,提高救援的效率和成功率.要完全代替施救人员下井施救。
关键词:运动仿真;电气控制;三维建模
Design and Control of Rescue Manipulator
Abstract:With the frequent occurrence of people falling into deep Wells, according to the statistics of relevant departments, there are tens of thousands of such accidents every year across the country, causing incalculable loss of life and property. Mechanical Wells are important resources in rural areas. They are installed on the roadside, without covering things and without warning signs around, making it difficult for people to pay attention to them. As a result, there are more accidents of people falling from deep Wells. At present, although there are deep well rescue devices, but there are also big defects, can not bring convenience to deep well rescue, can not be widely used. The common rescue method is to send rescuers down the well or use excavators and other large equipment to rescue. But the well is generally deep, rescue personnel directly down the well will have oxygen, stuck in the well and other threats, and the caliber of the well is too small rescue personnel simply can not enter, the use of excavators and other large equipment rescue, not only a long time, poor safety, but also does not guarantee the life safety of underground trapped personnel, under special circumstances the use of excavators can not rescue. Therefore, the design of an efficient, high success rate of manipulator instead of firefighters rescue, can greatly reduce the loss of life and property and reduce the occurrence of tragedy
This design can avoid the safety hazards brought to rescue personnel in the rescue process, solve the problem that rescue personnel can not go down the well because the wellhead is too small, and improve the efficiency and success rate of rescue. To completely replace the rescue personnel down the well rescue, the manipulator should have higher flexibility and controllability. The trapped personnel are trapped in various forms at the bottom of the well, and the manipulator must be able to adapt to rescue work in a variety of complex situations, to solve the problem that rescue personnel can not go down the well because the wellhead is too small, and improve the efficiency and success rate of rescue. To completely replace the rescue personnel down the well rescue.
Key words: Motion simulation; Electrical control; Three-dimensional modeling ;
目录
目录 3
第一章 绪论 4
1.1 课题研究背景意义及国内外现状 4
1.2 课题研究内容及结构安排 5
1.3研究方法和途径 6
第二章 总体方案设计 7
2.1 功能设计 7
2.2 结构设计 8
2.3机械手材料选用 9
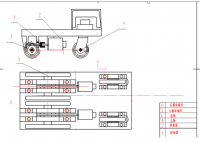
第三章 救援机械手建模 11
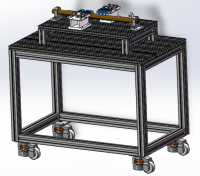
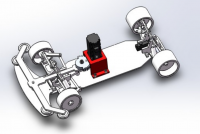
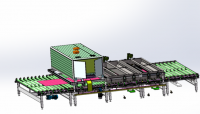
3.1 三维建模 11
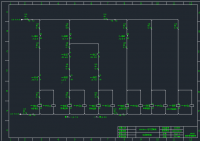
第四章 救援机械手的电气控制 16
4.1 总控制模块介绍 16
4.2 自动控制模块介绍 16
第五章 救援机械手的运动仿真 18
5.1 设备选择 18
5.2 PLC程序块说明 19
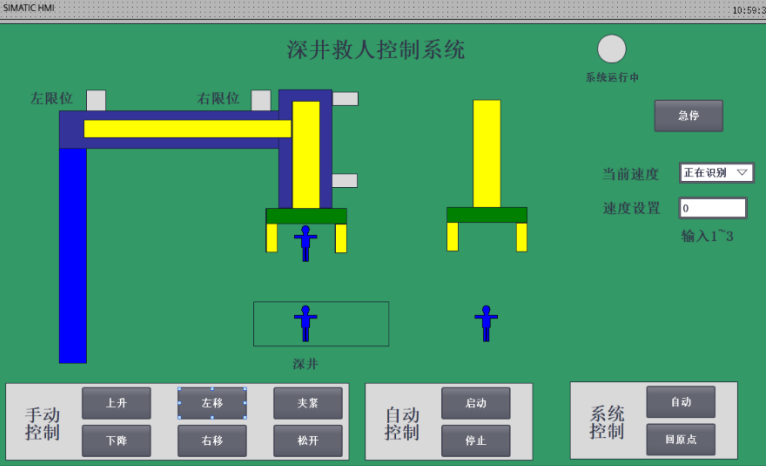
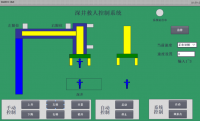
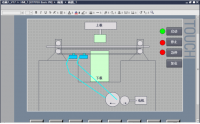
5.3 HMI设计说明 25
总结 28
致谢 29
参考文献 30
附录 32
第一章 绪论
1.1 课题研究背景意义及国内外现状
近些年来,随着工业技术的快速发展,人们对工业化的产品的需求和使用也不断增加,而机械手一直都是人们关注的对象。
我国是世界上的人口大国,但是由于农村的技术落后,加上保护措施的欠缺等诸多原因,我国农村一直频繁发生各种落井事故,在城市中,也有因为井盖丢失的情况,路过的行人没有注意到,导致我们国家的落井事故率和死亡率迟迟居高不下。而井口通常都很狭小,导致落井人员很难自行逃出,尤其是较深的井,可见度低,甚至有毒气等各种不利因素,导致被困者难以主动配合,连专业的救援工作都难以进行,给救援工作带来极大的困难,
灾难时刻是测试国家应急救援体系和设备能力的重要时刻。一个高效的灾害生命救援装备和实用的应急救助设备对于保障人民生命安全和减少损失至关重要, 我们需要进行不断地研发和改进以适应各种复杂环境下的灾害救援需求,只有这样,我们才能更快、更高效、更科学地开展灾害救援工作,并最大限度地减少灾害给人们带来的伤害。开展应急救灾设备是我们目前需要解决的重要问题,它关系到我们的建设和谐社会主义的理念能否体现,它关系到我们的人权和我们的国际声誉。救援机械手为一种高效的救灾工具已经在救助灾害的过程中开始崭露头角,像深井这类环境恶劣的情况下,恰恰是救援机械手的理想工作场合。
机械手的研究和应用在危险场合下具有重要意义,不仅能够保护救援人员安全,还能提高救援效率。虽然目前我国在该领域的技术水平与国外相比存在一定差距,但是国家正在积极推动救援机械手领域的发展和使用。同时,机械手的设计和研发需要充分的投入和支持,包括人力、物力和财力等方面。只有在国家、企业和科研机构的共同努力下,才能够不断提高技术水平,一步一步的实现救援机械手在各种危险场合下的应用。除了深井救援之外,还可以在地震、洪涝、火灾,矿灾等多个方面进行机械手的研发,不断优化救援机械手的功能,提高机械手的应用范围以及实用价值。
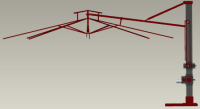
本设计的是一种主要针对于救援机械手的创新设计,通过救援机械手的结构设计,来保证机械手在特殊情况下完成任务,代替施救人员下井进行救援。根据救援任务的不同需求,设计救援机械手的机械结构,同时,还考虑了救援机械手的可靠性和稳定性,选择合适的材料和工艺
一、总体方案设计:
1.功能设计
2.结构设计
3.机械手材料选用
二、救援机械手装置三维建模
三、救援机械手的电气控制
四、救援机械手的运动仿真
参考文献
[1]李超.基于柔性臂的小口径深井救援机器人研制[D].哈尔滨工业大学,2020.DOI:10.27061/d.cnki.ghgdu.2020.000911.
[2]邢天羿,刘春明,张邦成,谭海东.微小型救援机械手的正、逆运动学仿真分析[J].长春工业大学学报,2015,36(01):11-16.DOI:10.15923/j.cnki.cn22-1382/t.2015.1.03.
[3]杨云凯,钟佩思,周淑芳,马诗乐,孙钰雁.两手式深井救援装置的设计[J].煤矿机械,2014,35(11):1-3.DOI:10.13436/j.mkjx.201411001.
[4]王嘉凌. 救援机器人的机械手和避障系统研究与实验[D].上海交通大学,2014.
[5]赵亮培,高迟.小口径深井救援机械手的设计[J].煤矿机械,2013,34(08):171-172.DOI:10.13436/j.mkjx.2013.08.065.
[6]丁昌鹏,张屹,张虎,王盈.深井救援机械手的机构设计[J].三峡大学学报(自然科学版),2011,33(02):79-84.
[7]韩书葵,王丽萍,杜韧,蔡毅,刘卫. 救援机械手:CN201510308410.7[P].北华航天工业学
院.2015-09-30.
[8]李超. 基于柔性臂的小口径深井救援机器人研制[D].哈尔滨工业大学,2020.DOI:10.27061/d.cnki.ghgdu.2020.000911.
[9]胡人元.深井被困事故井下救援处置程序体系构建[J].武警学院学报,2020,36(02):35-38.
[10]别远辉,梁启文.新型狭窄井口深井救援设备研发[J].消防技术与产品信息,2018,31(08):87-
[11]周红军,黄攀,王永泉.圆桶形快速深井救援装置设计[J].现代制造技术与装备,2018(03):83-84.DOI:10.16107/j.cnki.mmte.2018.0134.
[12]张京.消防员深井救助技术研究[J].湖北警官学院学报,2014,27(01):176-178.
[13]徐琰, 狭窄深井智能化救援装备研究. 上海市,应急管理部上海消防研究所,2021-12-29.
[14]郝昕.手绘:《深井救援》[J].中国消防,2021(09):71.
[15]张靖,宋家驹,宋志彬,李媛.小口径深井救援技术探讨[J].消防技术与产品息,2015(11):34-
37.



