基于UG双向伸缩式货叉结构及PLC控制系统设计
摘要: 近年来,随着物流行业的迅猛发展,集中仓储中心逐渐成为物流业中货物集散的重要场所。同
时,随着科学技术的不断进步,仓储中心也在不断改进和发展。目前,仓储中心已经从仅仅承担仓储功能
的单一模式,逐渐向纵向和立体化的智能仓储模式转变。
在这种立体仓储中心中,伸缩货叉被广泛应用,起到了关键的作用。伸缩货叉是一种能够沿着垂直方
向进行伸缩的货叉设备,能够方便地将货物从地面高度升至多层高度,成功完成了货物在仓库的储存。
立体仓储中心合理的分配了存货位置,将存储密度提高到最大化。这种仓储中心的三维智能化设计既
能够提高货物的储运时效,也能够减少运输费用,同时提高了货物储存的可靠与安全性。
本次设计的目的是针对一种立体仓储中心中使用的双向伸缩货叉进行设计。首先,通过对立体仓库的
背景资料的查阅以及对目前已经使用的伸缩货叉的结构形式进行资料分析,确定了货叉的使用功能和要求。
根据以上内容,对其方案设计,结构方案的不一样做对比做分析,来选择设计方案。在结构设计过程中,
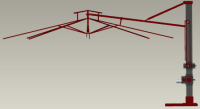
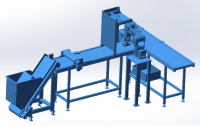
进行了三维结构建模,完成了双向伸缩货叉的动画仿真设计,且运用了软件对重要零件进行力的分析。
还设计了控制系统,根据货叉日常使用编出梯形图。集成了位置检测传感器以及对变频器进行多段调
速的方式,实现了一个较为智能和安全的控制系统设计。
关键词:双向伸缩货叉设计;PLC 控制系统设计;三维设计;动画仿真设计;有限元分析;立体仓储中心
目录
摘要................................................................................................... 1
ABSTRACT .............................................................................................2
第 1 章 绪论........................................................................................ 1
1.1 课题研究的背景资料分析......................................................... 1
1.2 伸缩货叉在立体仓储中的使用分析............................................2
1.2.1 立体仓库存取结构简述................................................... 2
1.2.2 货叉在存取结构中的使用................................................3
1.3 课题研究现状分析................................................................... 3
1.4 课题研究的意义...................................................................... 4
第 2 章 双向伸缩货叉的方案设计.......................................................... 5
2.1 双向伸缩货叉整体设计要求......................................................5
2.2 结构设计方案分析................................................................... 5
2.2.1 传动结构整体方案分析................................................... 5
2.2.2 链轮传动结构方案分析................................................... 6
2.2.3 带传动结构方案分析...................................................... 6
2.2.4 齿轮传动结构方案分析................................................... 7
2.3 控制系统方案分析................................................................... 8
2.3.1 控制器的选择比较..........................................................8
2.3.2 控制方案分析................................................................ 8
第 3 章 双向伸缩货叉的结构设计与计算分析........................................10
3.1 齿轮齿条设计以及结构布置.................................................... 10
3.1.1 齿轮齿条设计...............................................................10
3.1.2 齿条的设计..................................................................11
3.1.3 齿轮齿条的排列组合设计..............................................11
3.2 双向伸缩货叉的伸缩版固定结构设计.......................................12
3.3 双向伸缩货叉的整体结构设计.................................................13
3.4 电机的计算设计选型分析....................................................... 14
3.5 减速机的计算选型分析...........................................................16
3.6 轴承的寿命校核.....................................................................16
第 4 章 双向伸缩货叉的三维建模分析以及有限元分析......................... 20
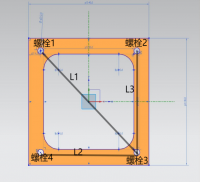
4.1 零件建模举例分析................................................................. 20
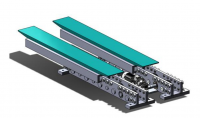
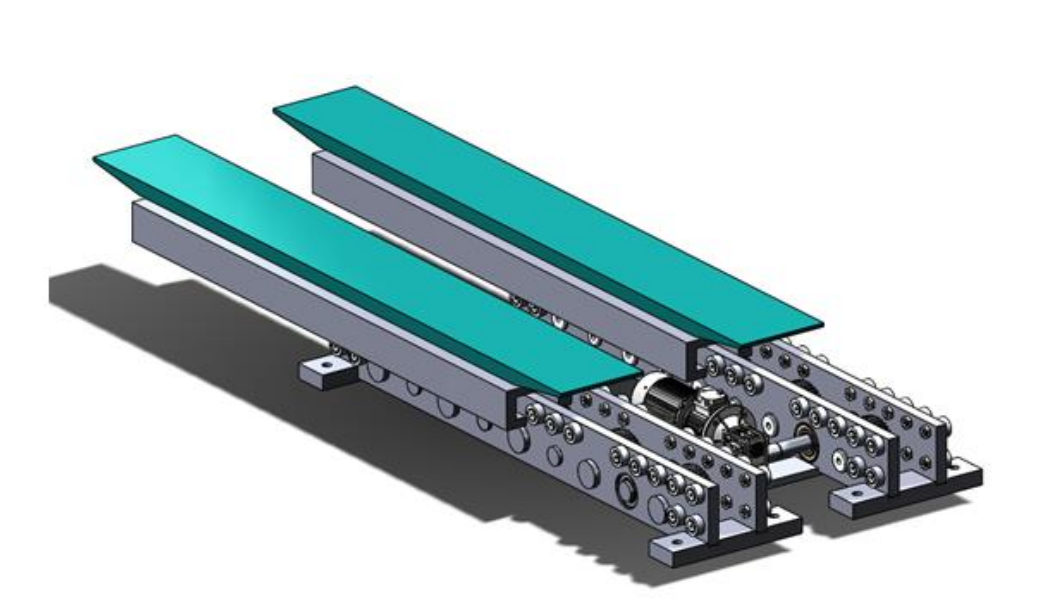
4.2 三维装配图的绘制................................................................. 24
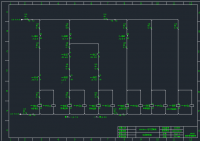
4.3 工程图的绘制........................................................................ 25
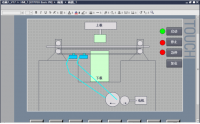
4.4 三维动画仿真设计................................................................. 26
4.5 双向伸缩货叉的三维有限元分析............................................. 27
4.5.1 双向伸缩叉板的有限元分析...........................................27
4.5.2 货叉支撑竖板有限元分析..............................................33
第 5 章 双向伸缩货叉的控制系统设计..................................................36
5.1 控制系统的硬件组成.............................................................. 36
5.2 主要硬件选型分析................................................................. 36
5.2.1PLC 选型分析................................................................36
5.2.2 变频器选型分析........................................................... 37
5.2.3 限位开关的选型分析.....................................................39
5.3I/O 表的分配..........................................................................39
5.4 电路图的绘制........................................................................ 40
5.4.1 主电路图绘制...............................................................40
5.4.2PLC 外部接线图绘制......................................................41
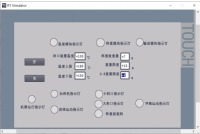
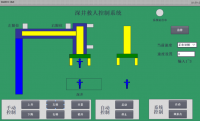
5.5 程序设计...............................................................................42
致谢................................................................................................. 47
参考文献...........................................................................................48
参考文献
[1] 濮良贵等,机械设计(第九版),北京:高等教育出版社,2013
[2] 闻邦椿,机械设计手册(第五版),北京:机械工业出版社,2010
[3] 庄茁等,基于 Solidworks 的有限元分析和应用,北京:清华大学出版社,2009
[4]孙桓,机械原理(第八版),北京:高等教育出版社,2013
[5] 史耀耀, 唐虹, 余强.数控货叉关键技术[J]. 航空学报,2008,29(1) : 234-239.
[6] 张宁.伸缩器的检定方法及误差分析[J].计量与测试计术,2017,44(05):105-106
[7] 郭庆荣.货叉器货叉推力的计算[J],1990(04):51-53.
[8]张纪元 ,沈守范 .确定机构动学解的区间分析法 .北京:机械工程学报 ,199l, 4
[9] 侯珍秀.机械系统设计[M].黑龙江:哈尔滨工业大学出版社,2000.
[10] 徐灏.机械设计手册[J].北京:机械工业出版社, 1991.
[11] 邵忍平.机械系统动力学[M].北京:机械工业出版社,2005.
[12] 胡玉睿.机械手原理 [M].北京:中央广播电视大学出版社,2004.
[13] 张建民.机电一体化系统设计(第二版).北京:高教出版社,2001.
[14] 郑堤,唐可洪.机电一体化设计.北京:机械工业出版社,2005.
[15] 单辉祖.材料力学.高等教育出版社,2009.
[16] 廖汉元,孔建义.机械原理.机械工业出版社.2000.
[17]李駪. 机电一体化控制技术[M].东北师范大学出版社,2014.
[18]张翠华,杨文敏,杨胜培,芦书荣. 机械设计[M].西安:西北工业大学出版社
[19]卢秉恒. 机械制造技术基础[M].北京:机械工业出版社,2007.12