





















两轮自平衡车的原理是什么? 单片机毕业设计大全
通过做平衡车,最大的问题就是电机启动对传感器和单片机的干扰问题,还有就是平衡的稳定性不好等问题。我以ARduino,TB6612FNG直流电机驱动芯片,CP2102 USB接口,LAP15W4K61S4 STC,LM2940-5.0,NRF24l,MPU6050为核心。采用超声波测距模块作为平衡车状态的检测,免去了对加速度、陀螺仪传感器的理解和复杂处理算法,降低成本,采用电位器调整设定小车的平衡参数,不使用蓝牙无线模块或有线串口在线调整参数。用超声波测距的方案实现自平衡小车,同时,也有人提出这种方案无法在坡度变化的斜坡上保持平衡。它采用IO口TRIG触发测距,给最少10us的高电平信号。模块自动发送8个40khz的方波,自动检测是否有信号返回,若有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。但同时此模块不宜带电连接,若带电连接,则先让模块的GND端先连接,否则会影响模块的正常工作。测距时,被测物体的面积不少于0.5平方米且平面尽量要求平整,否则影响测量的结果。本文采用的陀螺仪测距作为小车平衡状态的检测,陀螺仪是一种用来传感与维持方向的装置,基于角动置守恒的理论设计出来的,陀螺仪主要是由一个位于轴心且旋转的转子构成,陀螺仪有抗于分向改变的趋向。它可以用于导航,定位系统。陀螺仪基本上就是运用物体高速旋转时,角动量很大,旋转轴会一直稳定指向一个方向的性质,所制造出来的定向仪器,不过它必须转得够快,惯量够大,不然仅要一个很小的力矩,就会严重影响到它的稳定性。在小车上安装陀螺仪,可测出小车的倾斜角速度,将角速度信号进行积分可得到小车的倾角。由于从陀螺仪角速度信号存在偏差和漂移,经积分运算会变成积累误差,最终会导致无法形成正确的角度信号。我们可以通过测小车的运行速度和加速度来矫正陀螺仪的积分漂移。
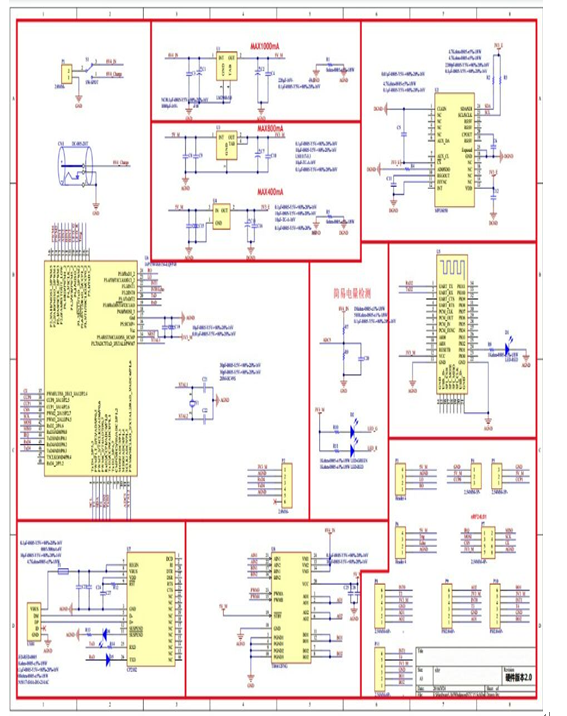
原理图如下:




