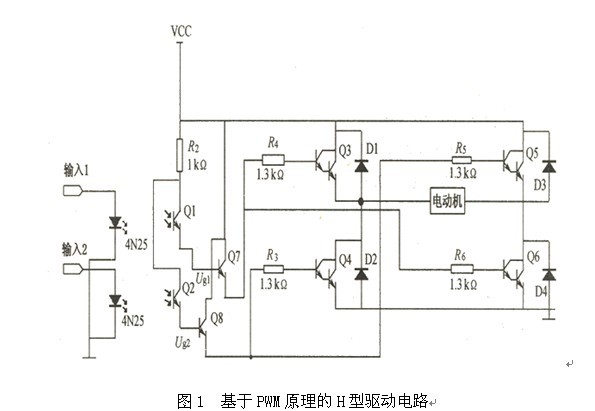


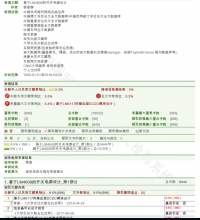


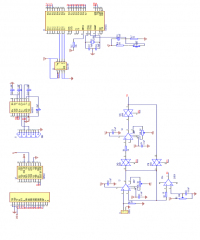




基于PWM原理的H型驱动电路的设计
当Ug1为高电平 ,Ug2为低电平时,Q3、Q6 管导通,Q4、Q5管截止,电动机正转。当Ug1为低电平,Ug2为高电平时,Q3、Q6管截止,Q4、 Q5 管导通,电动机反转。另外四个二极管可以在Ug1由高变低时,通过D2、D4 两个二极管形成电动机电圈感应电压的回路,起到了保护电动机的作用。
在实验中的控制系统电压统一为5V电源,因此若达林顿管基极由控制系统直接控制,则控制电压最高为5V,再加上三极管本身的压降,加到电动机两端的电压就只有4V左右,减弱了电动机的驱动力。基于上述考虑,我们运用了4N25光藕集成块,将控制部分与电动机的驱动部分隔离开来,这样不仅增加了各系统模块之间的隔离度,也使驱动电流得到了大大的增强。
光电耦合器4N25芯片内发光器由发光二极管构成,受光器由光电三极管构成,采用DIP-6封装,外引线6条。其中,1脚是阳极,2脚是阴极,3脚是空脚,4脚是发射极,5脚是集电极,6脚是基极。由于光电耦合器在结构上,输入与输出端彼此隔离,应用时输入电路与输出电路不共地,因此信号单向传输,输出对输入无影响,抗干扰能力强。
至于Ug1 与Ug2这对控制电压,我们采用了200Hz的周期信号控制,通过对其占空比的调整,对车速进行调节。最小脉宽为0.2ms,速度共分25挡,可以满足车速调整的精度要求。同时,可以通过Ug1与Ug2的切换来控制电动机的正转与反转。
2.6速度检测模块
方案1:基于光电鼠标原理
光电鼠标的工作原理是:在光电鼠标内部有一个发光二极管,通过该发光二极管发出的光线,照亮光电鼠标底部表面(这就是为什么鼠标底部总会发光的原因)。然后将光电鼠标底部表面反射回的一部分光线,经过一组光学透镜,传输到一个光感应器件(微成像器)内成像。这样,当光电鼠标移动时,其移动轨迹便会被记录为一组高速拍摄的连贯图像。最后利用光电鼠标内部的一块专用图像分析芯片(DSP,即数字微处理器)对移动轨迹上摄取的一系列图像进行分析处理,通过对这些图像上特征点位置的变化进行分析,来判断鼠标的移动方向和移动距离,从而完成光标的定位。基于此原理,在车轮上安装多个遮光条,用记数光脉冲的的方法测量小车的位移,并据此计算小车的速度。精度较高,但本设计中不需要如此高的精度,且安装较困难 。
方案2:透射式光电(或反射式光电)传感器
这样需在车轮上作比较大的机械加工(打孔或粘贴黑白反光板),而且市场上能买到的可用的光电传感器体积较大,不易安装,故没有采用。
方案3:采用霍尔集成片。
该器件内部由三片霍尔金属板组成,当磁铁正对金属板时,
由于霍尔效应,金属板发生横向导通,因此可以在车轮上安装磁片,而将霍尔集成片安装在固定轴上,通过对脉冲的计数进行车速测量
以上三种都是比较可行的转速测量方案。尤其是霍尔元件,在工业土得到广泛采用。方案二适用于精度较高的场合,可以车轮上加较多的遮光条来满足脉冲计数的精度要求,但本设计不需要如此高的精度,因此拟采用方案3。
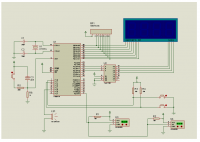
2.7显示电路
显示电路采用采用共阴极数码管7个进行动态显示,分别显示时间和路程,这有利于节省I/O口。显示时间的精度为1S,显示路程的精度为0.01m。通过利用霍尔元件检测小车速度在利用单片机来控制车的速度,小车运行的情况是通过轴上的带孔的圆片和光电检测器把脉冲信号送给控制部分。当小车检测到终点线时,停止运行10S,显示运行路程。
2.8总结
经过仔细的论证与比较,我们决定了系统各个主要模块的最终方案如下:
控制核心系统:使用AT89C52作为CPU。
电动机驱动与调速模块:采用两对互补三极管电动机驱动电路。
车轮检速模块:采用霍尔集成片构成的电路系统。
路面黑线检测模块:可见发光二极管与光敏二极管组成的发射~接受电路。。
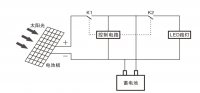
电源:电池源供电(6节M电池+1节9V方型电池)。
显示电路:共阴极数码管7个动态显示。
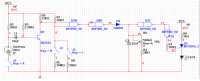
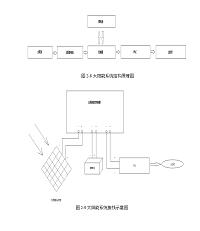
3系统硬件设计
自动往返小汽车的控制系统采样AT89C52单片机,显示系统采用3位LED数码管显示里程,4位LED数码管显示一次往返的时间,直流电机正/反转采用桥式驱动控制,2挡电压调速;里程检测采用霍尔传感器3210,跑道标志线采用光敏管检测并使用软件整形消抖,采用4个靠轮解决小汽车与挡板的摩擦问题。
3.1 AT89C52单片机的介绍
(1) 主要性能特点
兼容8052的单片机内核,12MHz额定工作频率(最大24MHz),8KB片内FLASH程序存储器,256Byte片内数据RAM ,3个16位定时/计数器,32条可编程I/O线,可允许2个优先级的8个中断源。
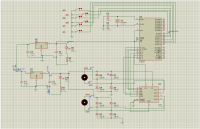
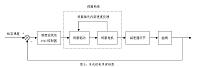
软件系统的主结构流程图如图2。小车按复位键后,即启动,以最慢的速度向前行驶,当检测到第一根黑线时,就会全速前进。为了保证小车停车位置正确,在检测到第五和第十一跟黑线时就开始减速行驶。

微信

QQ1:3097331788 QQ2:2601997959 QQ3:2993773635



