








基于 Arduino 单片机物联网智能避障小车的设计与实现
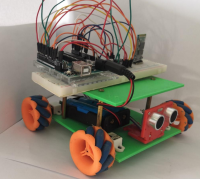
摘要:本文研究设计了一种基于 Arduino 单片机的物联网智能避障小车,以 Arduino 单片机为主控模块,并由 HC-SR04
组成的避障模块,由 HC-05 组成的无线通信模块,由 TB6612FNG 组成的电机驱动模块,N20 电机和能够 12V 转 5V
的电源模块构成物联网智能避障小车的整个系统。其中利用避障模块检测小车行进路线上的障碍物,然后经过小车
系统的判别处理,调节小车在行驶过程中的运行方向,使小车避开行进路线上的障碍物。利用无线通信模块将采集
到的传感器数据无线上传到手机 APP 端进行显示,还利用该模块将手机 APP 上发送的指令无线传输到主控模块,然
后主控模块通过无线通信模块接收到控制指令,实现控制小车的运动。在小车的电机驱动部分,使用两个电机驱动
四个减速电机的方案,搭建小车运动部分的硬件结构。
关键词:Arduino 单片机; 物联网;自动避障;无线通信
Design and implementation of intelligent obstacle avoidance car
for Internet of things
Abstract: This paper studies and designs an intelligent obstacle avoidance car for Internet of things based on Arduino MCU. The whole system of the intelligent obstacle avoidance car for Internet of things is composed of Arduino MCU as the main
control module, hc-sr04 as the obstacle avoidance module, HC-05 as the wireless communication module, TB6612FNG as
the motor drive module, N20 motor and 12V to 5V power supply module. Among them, the obstacle avoidance module is used to detect the obstacles on the car's route, and then through the discrimination processing of the car system, the running
direction of the car in the driving process is adjusted to make the car avoid the obstacles on the route. The wireless communication module is used to upload the collected sensor data to the mobile app for display. The module is also used to
transmit the instructions sent from the mobile app to the main control module, and then the main control module receives the
control instructions through the wireless communication module to control the movement of the car. In the motor driving part of the car, the hardware structure of the moving part of the car is built by using two motors to drive four deceleration motors. Keywords: Arduino single chip microcomputer; Internet of things; Automatic obstacle avoidance; wireless communication
目录
第一章 绪论...............................................................................................................................0
1.1 课题的背景及研究意义.............................................................................................0
1.2 国内外研究现状.........................................................................................................0
1.3 技术特点.....................................................................................................................1
1.4 课题主要研究的内容.................................................................................................1
第二章 总体方案设计...............................................................................................................2
2.1 设计思路.....................................................................................................................2
2.2 方案选择.....................................................................................................................2
2.2.1 主控模块选择.................................................................................................2
2.2.2 避障模块选择.................................................................................................3
2.2.3 无线通信模块选择.........................................................................................4
2.2.4 电机驱动模块选择.........................................................................................4
2.2.5 电机选择.........................................................................................................5
第三章 系统的硬件设计...........................................................................................................6
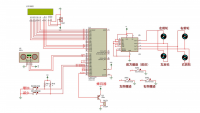
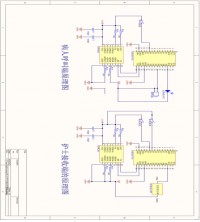
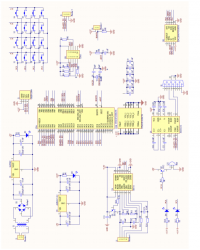
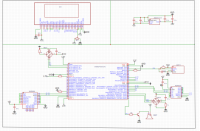
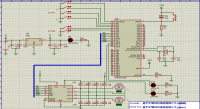
3.1 总电路设计图.............................................................................................................6
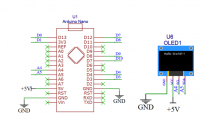
3.2 主控模块.....................................................................................................................6
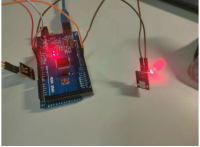
3.3 避障模块.....................................................................................................................8
3.4 无线通信模块.............................................................................................................9
3.5 电机驱动模块.............................................................................................................9
3.6 电机及车轮...............................................................................................................10
3.7 电源模块...................................................................................................................11
第四章 系统的软件设计.........................................................................................................13
4.1 单片机开发环境.......................................................................................................13
4.2 系统软件设计思路...................................................................................................13
4.2.1 主程序设计...................................................................................................13
4.2.2 超声波测距子程序设计...............................................................................14
4.2.3 避障子程序设计...........................................................................................15
4.2.4 蓝牙接收处理及数据发送子程序设计.......................................................16
4.2.5 电机控制子程序设计...................................................................................17
第五章 系统的组装与调试.....................................................................................................19
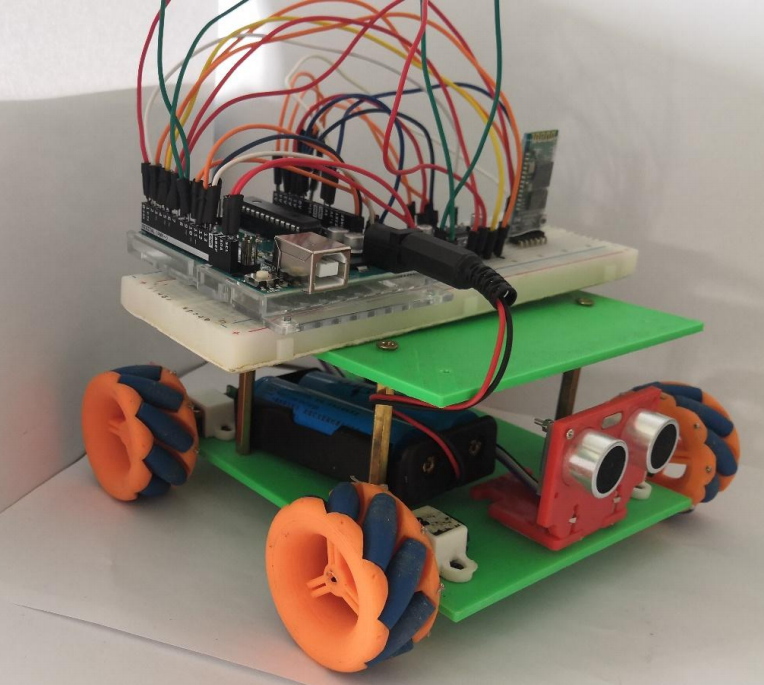
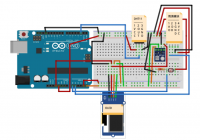
5.1 系统的组装...............................................................................................................19
5.1.1 组装前的准备...............................................................................................19
5.1.2 组装过程.......................................................................................................20
5.1.3 组装完成.......................................................................................................21
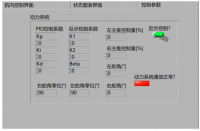
5.2 系统的调试...............................................................................................................22
5.2.1 自动避障部分的调试...................................................................................22
5.2.2 蓝牙无线控制部分的调试...........................................................................23
第六章 总结与展望.................................................................................................................25
参考文献...................................................................................................................................26
致谢...........................................................................................................................................27
附录: 程序代码.......................................................................................................................28
参考文献
[1]李罡,刘庶,张慧杰,赵梦冉.智能探险车控制系统的设计与实现[J].白城师范学院学报,2021,35(02):12-17.
[2]雷丹.智能 AGV 避障小车[J].机械工程与自动化,2021(02):146-147.
[3]黄传翔.基于 Arduino 单片机的智能机器人小车的研究[J].电子测试,2021(07):28-29+88.
[4]王瑞荣.基于单片机的超声波测距仪设计[J].电子测试,2021(05):22-23+33.
[5]曾颖琳,董欣,倪鹏,郭斌.基于 Arduino 的智能避障小车设计[J].科技与创新,2021(04):32-34+40.
[6]苏神保,刘丹.基于 Mind+的超声波红外避障 Arduino 机器人设计[J].广东通信技术,2021,41(01):71-74.
[7]何月阳,欧美英,段祥瑞,伍正国,张胜.基于 STMC89C51 的避障智能盲人眼镜设计[J].科学技术创
新,2020(31):152-153.
[8]杨海,高山峻,许文斌,杨雪婷.电力巡检机器人自动避障与轨迹规划系统研究[J].自动化与仪
表,2020,35(08):37-41.
[9]张波,徐传旭,李可,杨智,王晨阳.基于单片机的智能避障小车[J].内蒙古科技与经济,2020(15):100-101.
[10]孙恒,谷君豪,罗红梅,刘亮,孟德强.无线遥控小车的设计与实现[J].汽车实用技术,2020(15):25-28.
[11]温丽华.基于蓝牙技术遥控小车的设计与实现[J].计算机产品与流通,2019(12):111.
[12]吴杰,王小妮,刘鹏,王家坡,孙瑶.智能小车蓝牙通信模块设计与实现[J].北京信息科技大学学报(自然科学
版),2019,34(06):64-69+75.
[13]曹素红.基于 Arduino 平台的蓝牙智能小车开发[J].科技与创新,2019(23):22-23.
[14]乔凌霄,郭超维,刘源涛,温帅,孟朝霞.基于超声传感器的避障小车系统设计[J].运城学院学
报,2019,37(03):12-15.
[15]李朝阳,王建信.基于 Arduino 硬件的智能避障小车[J].轻工科技,2019,35(07):74-75+79.
[16]郭昊坤.基于单片机和蓝牙控制的智能小车设计[J].电子测试,2019(11):27-29.
[17]赵旭磊,耿召里,李小华.智能小车避障算法和速度调节算法研究[J].辽宁科技大学学报,2018,41(03):212-217.
[18]林奕奕,傅毅霖,戴陈伽,许晓惠,沈振辉.基于单片机的自控避障小车设计[J].价值工程,2018,37(17):180-182.
[19]张笑睿.超声波智能避障小车的设计与研究[J].计算机产品与流通,2018(04):136.
[20]张萍.超声波避障智能小车的设计[J].自动化仪表,2017,38(09):40-43.
[21]孟帅,常德军,陈章宝.双轮自平衡小车控制系统设计[J].电子世界,2017(01):89-90.
[22]李方旭,马彬瀚,丁伟,赵静秋.基于 HC-SR04 超声波传感器的智能避障小车设计[J].科技创新与应
用,2016(34):26-27.
[23]汤嘉立,李林,胡羽,周安华. 单片机应用技术实例教程[M].人民邮电出版社:, 201411.343.
[24]吴静进. 单片机实验及实践教程[M].人民邮电出版社:, 201409.181.
[25]李江全,聂晶,梁习卉子,刘新英. 单片机串口通信及测控应用实战详解[M].人民邮电出版社:, 201408.342.
[26]胡仁杰,堵国樑. 全国大学生电子设计竞赛优秀作品设计报告选编[M].南京东南大学出版社:, 201407.385.
[27]王建平,卢杉,武欢欢.TB6612FNG 在直流电机控制设计中的应用[J].电子设计工程,2010,18(06):65-67.



