








基于STM32单片机小车循迹避障跟随行驶系统设计与实现
摘要:随着科学的不断进步,人们对生活质量的要求也越来越高,进而市面上出现了很多智能产品,它们的
出现是必然的,智能产品的出现,很大程度上提高了人们的生活以及工作效率。此次设计采用超声波收发和
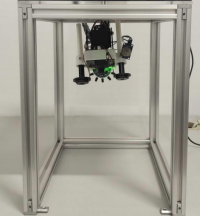
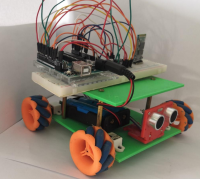
避障为设计基础并采用 STM32 单片机为内核芯片来对小车进行控制,小车系统由四个轮子的步进电动机组成。
并借助超声传送机的功能,顺利地将对应的超声讯号传送出去。另外,在小车中还安装了接收器,它将会顺
利地接收到来自发射器所发送的超声波信号,并通过声速、传递时间以及超声波接收器之间的距离,以超声
波探测为依据,可以通过超声波在空气中传播时碰见障碍物反射回来的时间计算出与障碍物的距离,实现转
弯、直行,因此,使得自动跟随小车可以 360 度转弯跟随。在本文中,先是简单地对目前主要的自动跟着方
案进行了描述,并进行了优劣的比较和分析。在此基础上,本文还对本设计所使用的超声定位跟着方案进行
了详细的描述,并将该方案的软硬件进行了设计。它由一个传感模组、一个无线模组、电机模块,循迹模块,
电源模块等,并对超声波定位识别算法,小车的控制算法进行了调试改进。最后,介绍小车的测试结果,分
析自动跟随小车的整体性能。结果表明,本课题采用的超声波识别定位方案可以高效、准确的得到目标的相
对位置并实现近距离跟随。
关键词:自动跟随小车,STM32,超声波发送接收器,超声波避障,电机控制
第一章 引言
1.1 研究背景和意义
目前,各类计算机技术逐渐得到了比较平稳的繁荣,多元化的智能化技术越
来越得到比较广泛的应用。在这种情况下,智能汽车就诞生了,它的应用范围很
广,包括了电子学和机械学。而且,在目前这个时代,机器人技术还在不断地得
到快速的发展。渐渐的,它进入了每一个家庭。从实质上来说,智能小车实际上
是一种机器人技术,如果对它进行了科学、深入的研究,一定可以有效地推动智
能机器人技术在今后一段时间内的稳步发展。随着对智能技术的深入,全世界的
学者都在关注着多种技术的潜在应用价值。其实,每一次的电子类比赛中,都会
有关于智能车的比赛。世界上许多大学都把目光投向了这一领域。目前,无人车
技术在近几年中已是一个热点,并且逐渐向实用方向发展。虽然说,智能车看似
无关紧要,但从无人车的技术角度来分析,这些自动驾驶的技术,都是从无人车
开始发展的,所以,无人车的研究,也是非常重要的。本文就是在这种情况下提
出来的,它能够被运用到很多领域,比如:校园图书馆还书、家庭看护、快递配
送等,因此,本文的设计是和现实关联的,具有很强的实用价值。
从长期来看,智能汽车一定会得到比较普遍的实用价值。如果将传感器技术
与无人驾驶技术有机地结合起来,就可以使车辆不断地进行自适应行驶,从而获
得更好的行驶效果。事实上,智能小车不但可以应用在港口、工厂等场所,完成
监控、消防扑救等一系列重要的工作,还可以与城市等新的场景相融合,负责远
距离的还书和“最后一公里”的送货。
目录
第一章 引言 .......................................................... 1
1.1 研究背景和意义 ............................................... 1
1.2 国内外研究现状 ............................................... 1
1.2.1 国外研究现状 ............................................ 1
1.2.2 国内研究现状 ............................................ 2
1.3 小车开发工具介绍 ............................................. 2
1.3.1 STM32 开发工具 J-Link .................................... 2
1.3.2 STM32F103RCT6 微控制器 .................................. 4
1.3.3 STM32F103RCT6 最小系统 .................................. 4
第二章 分析与设计 .................................................... 6
2.1 超声波应用分析 ............................................... 6
2.2 小车方案分析 ................................................. 7
2.3 本章小结 ..................................................... 7
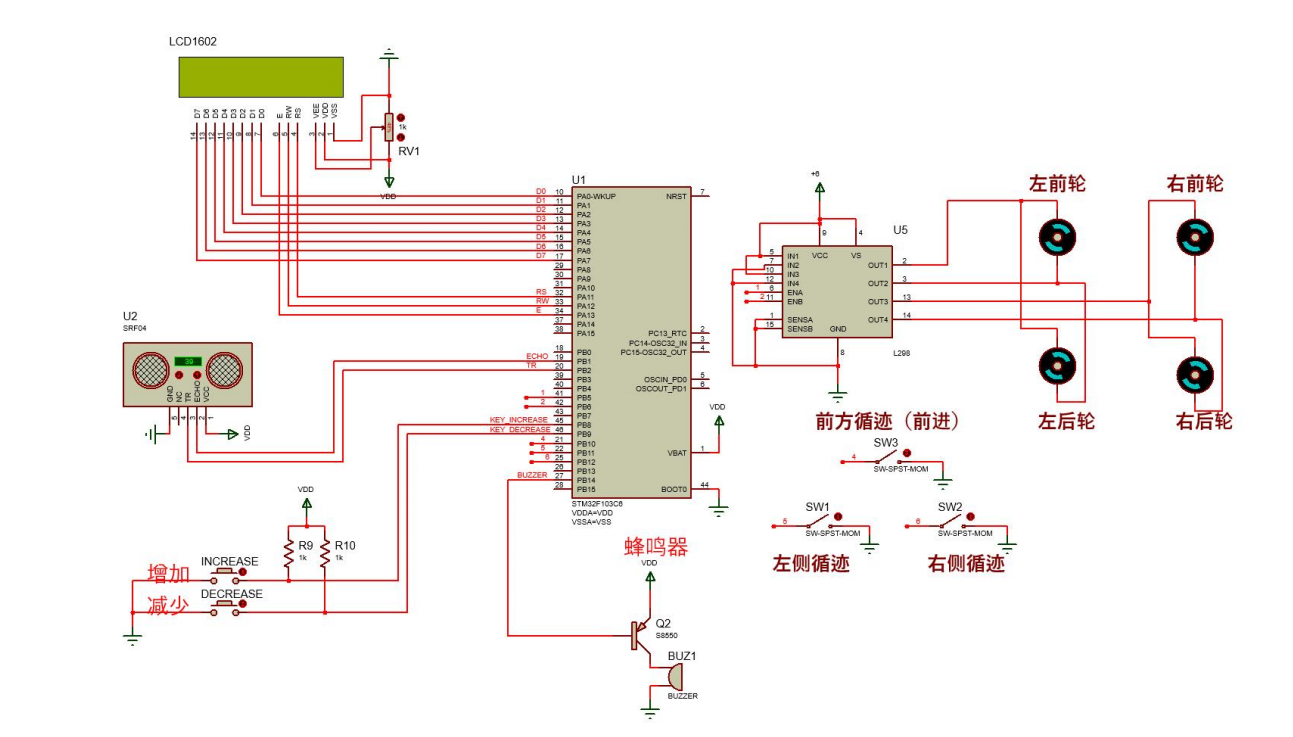
第三章 硬件设计 ...................................................... 8
3.1 硬件分析 ..................................................... 8
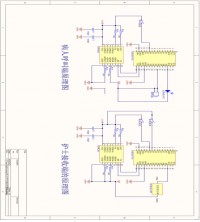
3.2 超声波发送接收模块 ........................................... 8
3.2.1 超声波发送接收原理 ...................................... 9
3.2.2 超声波电路设计 .......................................... 9
3.3 2.4G 无线模块 ................................................ 12
3.4 电机驱动模块 ................................................ 13
3.4.1 电机驱动电路设计 ....................................... 13
3.4.2 电机驱动使用方法 ....................................... 14
3.5 循迹模块 ..................................................... 15
3.6 直流电机 .................................................... 16
3.6.1 直流电机原理 ........................................... 16
3.6.2 减速器介绍 ............................................. 17
3.6.3 电机使用说明 ........................................... 18
3.7 锂电池 ...................................................... 18
3.7.1 锂电池简介 ............................................. 18
3.7.2 锂电池选择 ............................................. 19
3.8 电源稳压模块 ................................................ 19
3.8.1 DC-DC 电路简介 ......................................... 19
3.8.2 Buck 电路设计 .......................................... 19
3.9 锂电池充电器 ................................................ 20
3.10 舵机 ........................................................ 22
3.10.1 舵机介绍 .............................................. 22
3.10.2 舵机工作原理 .......................................... 23
3.10.3 舵机控制方法 .......................................... 23
第四章 软件设计 ..................................................... 25
4.1 开发环境介绍 ................................................ 25
4.2 软件分析 .................................................... 25
4.3 软件设计概要 ................................................ 26
4.4 超声波定位算法的原理和实现 .................................. 27
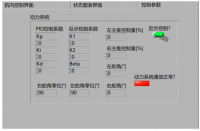
4.5 方向控制 ..................................................... 28
4.6 自动循迹程序设计 ............................................. 29
4.7 本章小结 .................................................... 30
结论 ................................................................ 31
致谢 ................................................................ 32
参考文献 ............................................................ 33
附录 ................................................................ 34
参考文献
[1]曹凯. 移动机器人技术研究现状与未来[J]. 信息系统工程, 2013(5):140-140.
[2]刘鹏. 基于天基探测器的月球卫星定轨问题[D]. 南京大学, 2014.
[3]彤宇. 机器人在一汽[J]. 中国科技财富, 2001(2):14-15.
[4]张雅娟, 戴胜华. JTAG 基本原理及仿真器性能比较[J]. 单片机与嵌入式系统应用, 2007, 7(5):18-20.
[5]佚名. GPS 工作原理[J]. 能源与节能, 2017(3):122-122.
[6]武建国. 锂离子二次电池的充电原理[J]. 家电检修技术, 2009(6):47-47.
[7]聂宪波, 邵泽箭, 巩文文, et al. 基于单片机自动跟随小车的设计与制作[J]. 山东工业技术,
2015(4):158-158.
[8]刘伟丽. 自动跟随小车控制系统[D]. 长春理工大学, 2013.
[9]肖晓兰, 黄海峰, 刘利河,等. 一种可自动跟随手机行走的小车[J]. 机械工程与自动化,
2016(2):189-191.
[10]毛祖光,杨洁.自循迹智能小车控制系统的设计与实现[J].科技
风,2022(14):7-9+69.DOI:10.19392/j.cnki.1671-7341.202214003.
[11]杨佳义.自动循迹小车控制系统设计[J].南方农机,2022,53(06):50-53.
[12]许皓博.自动循迹跟随智能小车设计[J].数字通信世界,2022(01):132-134+137.
[13]洪一民,钱庆丰,章志飞.基于 STM32 的智能小车循迹避障测距的设计[J].物联网技
术,2022,12(01):12-13+17.DOI:10.16667/j.issn.2095-1302.2022.01.004.
[14]曾尧.基于 STM32 的智能小车循迹优化设计[J].机械工程师,2022(01):25-27.
[15]杨潞霞,安琪霞,曹砚江.基于 Arduino 的智能循迹小车的设计与实现[J].电子测
试,2022(01):19-22.DOI:10.16520/j.cnki.1000-8519.2022.01.004.
[16]Chang EnChih,Wu RongChing,Chang Heidi H.,Cheng ChunAn. Robust Intelligent Tracking Control
Technique for Single-Phase SPWM Inverters[J]. Processes,2022,11(1).
[17]Sauer Timm,Gorks Manuel,Spielmann Luca,Zindler Klaus. Automatic Track Guidance of Industrial
Trucks based on AI[J]. ATZheavy duty worldwide,2022,15(4).
[18]Communication Networks Security and. Retracted: Research on Wushu Sports Feedback System Based
on Real-Time Target Intelligent Tracking Video Processing[J]. Security and Communication
Networks,2022,2022.
[19]Mobile Computing Wireless Communications and. Retracted: Technical Research on Moving Target
Monitoring and Intelligent Tracking Algorithm Based on Machine Vision[J]. Wireless Communications
and Mobile Computing,2022,2022.
[20]Ali Hakami Nada,Hosni Mahmoud Hanan Ahmed,AlArfaj Abeer Abdulaziz. An Intelligent Tracking
System for Moving Objects in Dynamic Environments[J]. Actuators,2022,11(10)



